智能阀门定位器的流量特性实现研究
智能阀门定位器包含直线、等百分比、快开和用户设定等流量特性,用户可以自由设定。根据气动薄膜调节阀的特点,阀杆位移的变化与旋转电位器的变化呈非线性关系,通过非线性修正方法对阀位反馈进行修正。采用曲线拟合的方法,得到流量特性曲线方程,最终实现了智能阀门定位器直线、等百分比和快开流量特性,达到更高精度的流量控制要求。
智能阀门定位器具有高可靠性,高控制精度,网络通信,多功能扩展等特点,能够适应工业控制体系间网络化、集成化、智能化方向的发展要求,广泛应用于工业流量控制领域,在石化、冶金、电力、炼油等工业流量控制中发挥着不可替代的作用。然而,相对国外产品而言,国内产品在流量控制方面,存在调节速度慢、精度低的缺点。
流量特性的精度与智能阀门定位器安装精度、阀位反馈、AD采样精度和流量特性曲线拟合精度等有关。本文主要针对影响流量特性实现的因素进行分析和研究,致力于实现更高精度流量特性。
1、智能阀门定位器工作原理
微控制器根据阀位反馈信号与阀位设定信号的偏差大小和方向,输出控制指令到压电阀,通过压电阀控制执行机构膜室内的气压。当偏差较大时,定位器输出一个高占空比PWM信号给压电阀,使执行机构快速进/排气;当控制偏差较小时,定位器输出低占空比PWM信号,使执行机构慢速进/排气;当偏差在允许误差范围(自适应或死区设置)内,则输出保持信号,使膜室内的气压保持不变。
智能电气阀门定位器的工作原理如图1所示。
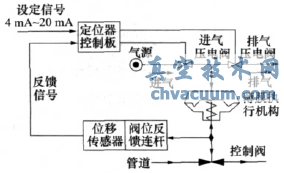
图1 智能阀门定位器工作原理图
2、定位器的流量特性
调节阀流量特性和定位器的流量特性是两个不同的概念。调节阀理想流量特性是指在调节阀前后压差固定不变情况下的流量特性,用通过阀芯相对流量与控制信号相对变化的比值来表示。调节阀的流量特性取决于阀芯的形状,有直线、等百分比、抛物线及快开4种典型的固有流量特性。
定位器的流量特性是指定位器输入信号与阀门开度之间的关系。对于一个确定的阀,其结构特性不变,即流量的相对变化与阀杆相对位移的比值是不变的。智能阀门定位器可以通过改变阀杆相对位移与控制信号的相对变化之间的比值,从而改变调节阀的流量特性。
在定位器的流量特性实现过程中,根据给定的流量特性数据,采用曲线拟合的方法,获得流量特性曲线方程,编程实现输入信号与阀门开度之间的关系。当定位器安装在调节阀上,用户可以选择不同的流量特性曲线,实现调节阀的流量控制。
3、阀位反馈非线性修正
非线性修正是用于解决阀杆行程与阀位反馈信号之间的非线性。阀位反馈模块是由反馈连杆、减速齿轮和位置传感器等组成,其机械连接原理示意图如图2所示,位置传感器采用高精度导电塑料旋转电位器,将执行机构的直行程转换为角位移。
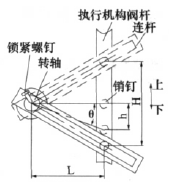
图2 阀位反馈模块机械连接原理图
阀杆运动距离h与连杆转角θ之间的关系为:
h=Ltanθ (1)
其中,θ∈[-α/2,α/2],h∈[-H/2,H/2],α为连杆全行程转过的角度,H为阀杆全行程的距离。
由于电位器为线性电位器,所以电位器可变端电压ui与连杆转角θ之间的关系为:
其中,u0为阀杆行程0%对应的阀位反馈信号,u1为阀杆行程100%对应阀位反馈信号。
电位器可变端电压ui与对应的AD采样值Di的关系可表示为:
Di=kui (3)
阀杆行程的相对变化与阀位反馈信号相对变化的比值为:
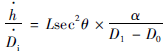
旋转角度与电位器电压成线性,阀杆行程与转角成正切关系,通过非线性修正,阀杆行程与反馈信号才为线性关系。阀位反馈信号的非线性修正是实现更精确的流量控制的有效方法。
4、实验
以SEPP4000阀门定位器为研究对象,进行静态特性和流量特性实验。输入信号为4mA~20mA的电流信号,输出信号为阀门的开度,通过检测阀位反馈信号获取阀门的开度信息,为了使阀门开度与阀位反馈信号的百分比相等,采用公式(4)进行阀位反馈的非线性修正。
4.1、静态特性实验
定位器静态特性表现为定位器实测曲线与理想曲线之间的一致性。
安装SEPP4000智能阀门定位器,使定位器的行程正好为全行程的一半时,定位器反馈杆在水平位置(即垂直于阀杆)。以线性流量特性为例,进行定位器静态特性实验。数据处理流程图如图3所示,误差对比如表1所示。
表1 阀位反馈非线性修正前后误差
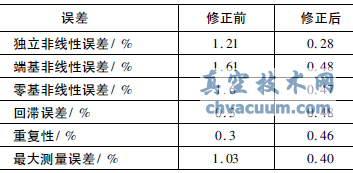
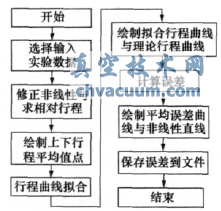
图3 数据处理程序流程图
修正前,实验测得的数据的重复性为0.3%,即小于0.5%,均达到待测定位器的指标。但行程曲线的基本误差、非线性误差和最大测量误差都较大。
修正后,实验测得的数据的重复性较小为0.48%,回滞误差也较小为0.46%,均达到待测定位器的指标;而且所得行程曲线的基本误差、非线性误差和最大测量误差均小于0.5%,达到定位器的指标要求。
4.2、流量特性实验
选择定位器的流量特性曲线线性、等百分比1∶25,等百分比1∶50,反等百分比25∶1,以10%为增量从0%到100%的等差输入电流信号,测量阀位反馈电压信号AD采样值,得到实际流量特性曲线点集,用MATLAB软件拟合实测曲线如图4、图5所示。星形点为实验所测的行程值,实线为所测的流量曲线,虚线为定位器的理想流量特性曲线。
修正前后,流量特性误差对比如表2所示。
表2 修正前后流量特性曲线误差对比
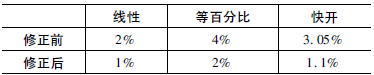
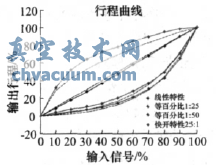
图4 修正前理论与实测流量特性曲线
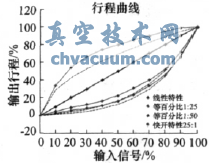
图5 修正后理论与实测流量特性曲线
各实测行程曲线均较光滑,以快开流量特性为例,采用不同拟合函数,误差对比如表3所示。采用指数函数进行曲线拟合,误差更小,效果更好。
表3 不同拟合函数拟合误差对比

5、结论
可通过非线性修正方法减小由反馈机构本身的非线性造成的误差。通过非线性修正后,流量特性的非线性误差、回滞误差、重复性均达到智能阀门定位器的指标,为达到了更高精度的流量控制要求打下基础。