智能阀门定位器控制算法的改进
国内诸多阀门定位器产品使用五步开关控制算法,但在低阀位控制时振荡次数多,高阀位控制时调整时间长,因而对五步开关控制算法进行改进。将改进后算法的控制效果与五步开关控制算法控制效果进行对比,算法改进后调整时间减小1.6s,超调量减小12.8%,实现了更快速准确的阀门定位。
智能阀门定位器作为气动调节阀的主要附件之一,可以改善阀门的特性,提高控制的精度、速度和增加控制的灵活性。智能阀门定位器具有控制精度高、可靠性好、流量特性易修改及具有诊断和检测功能等优点,在石油、化工、电力及冶金等工业企业的流量控制中发挥着不可替代的作用。
我国在智能阀门定位器的研究过程中,取得了一些成果。控制算法是智能阀门定位系统的核心,算法的优劣将直接影响阀的定位精度和定位速度。在国内的很多阀门定位器产品中,控制算法采用五步开关控制算法。笔者针对阀门定位器五步开关控制算法的研究和改进,旨在实现更好的控制效果。
1、智能阀门定位器控制系统
1.1、智能阀门定位器工作原理
定位器的工作原理如图1所示。定位器接收4~20mA的标准电流信号,转换为阀位设定值,执行机构的直线或转角实际位移通过连接装置转换为角度位移,并由位置传感器测得,反馈至微处理器,微处理器将实际阀位反馈值和设定值进行比较,检测到偏差后,根据偏差大小和方向输出脉宽调制指令到压电阀,压电阀按控制指令调节膜头进气量和排气量。
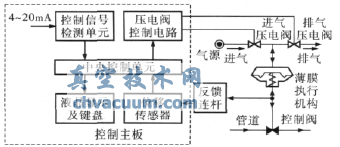
图1 智能阀门定位器控制系统框图
1.2、压电阀工作原理
压电阀是控制主板的直接控制对象,其性能参数如下:
工作电压 24VDC;工作电流 小于10μA;维持电流 0μA;响应时间 小于20ms;电容 小于100nF;工作气压 12~800kPa;流量 130L/min;工作温度 -30~+60℃。
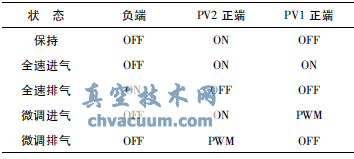
压电阀模块采用两个开关式压电阀(PV1和PV2)和两个单向阀构成控制气路。主控制器通过控制算法,输出PWM控制压电阀的动作,从而实现调节阀的进气、排气与保持状态。进气、排气与保持状态对应压电阀的状态见表1。
表1 压电阀得失电控制状态
2、控制算法
2.1、五步开关控制算法
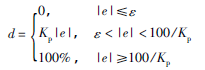
五步开关控制算法,即Bang-Bang控制和正向PWM相切换的方法,根据阀位设定信号与阀位反馈信号之间的偏差大小,采用相应的PWM信号控制压电阀,从而实现排气、进气和保持状态。当阀位偏差较大时,压电阀全开,调节阀全速进气,阀位迅速到达设定位置,实现粗调;当阀位接近设定位置时,在一定范围内按设定的周期和占空比,输出PWM控制信号,进行微调;为避免调节阀在设定位置附近频繁的振荡,设定死区范围ε,当偏差位于死区范围内时,关闭压电阀,使阀位保持当前位置。
PWM控制信号和阀位偏差之间的关系为:
五步开关控制算法流程如图2所示。
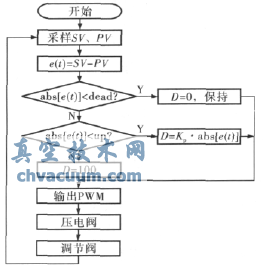
图2 五步开关控制算法流程
2.2、改进的五步开关控制算法
理想情况下,开关阀的等效开口截面积与占空比之间的关系是线性的,但由于压电阀的滞后性和阀芯惯性,高电平持续40ms以上才能保证阀芯开启,低电平持续10ms以上才能保证阀芯关闭。占空比修正公式为:
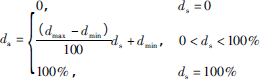
式中da———修正输出占空比;ds———期望输出占空比;dmin———压电阀动作的最小占空比;dmax———压电阀动作最大占空比。
根据气动薄膜调节阀调节效果的特点,高阀位时,气室和气源压差变小,相对于低阀位而言,在相同的充气脉冲时间内充入的气体更少。为改善高阀位时响应速度,使PWM的占空比随阀位的升高而加大。在五步开关算法占空比的基础上,添加随阀位反馈线性变化的占空比,改进后的五步开关算法占空比的计算公式为:
d*=da+KdPV (3)
3、实验效果对比
国内乐清市自动化仪表九厂生产的智能阀门定位器SEPP4000采用五步开关控制算法,当设定值由10%变化至90%时,阀位反馈电位器输出对应的电压范围是788~632mV;当设定值由90%变化至10%时,阀位反馈电位器输出对应的电压范围是632~784mV。
进行空载下闭环控制试验,将改进后的五步开关控制算法的控制效果与标准五步开关控制算法的控制效果进行对比。阀位反馈信号响应曲线如图3~6所示。
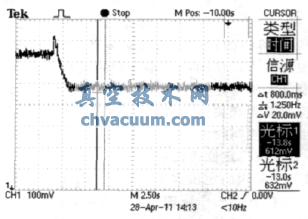
图3 标准五步算法进气状态下响应曲线
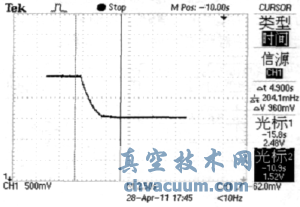
图4 改进五步算法进气状态下响应曲线
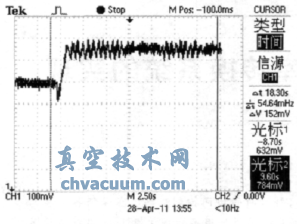
图5 标准五步算法排气状态下响应曲线
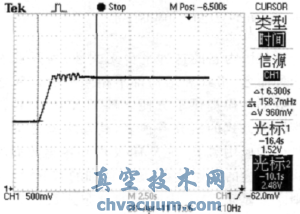
图6 改进五步算法排气状态下响应曲线
调整时间与超调量的比较见表2。
表2 控制效果比较
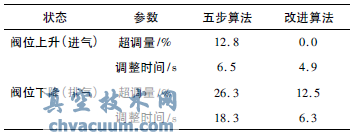
通过比较发现,改进后的五步开关控制算法调整时间更短,在高阀位时表现更为明显。
4、结束语
根据气动薄膜调节阀的特点,低阀位时,气室进气少,气压小,由于气体的可压缩性,调整时间短但更容易出现超调现象;高阀位时,调整时间长,气室进气多,气压相对稳定。笔者通过五步开关控制算法的改进,经过实验效果对比,有效缩短了调整时间,减小了超调量,控制效果更理想。对PWM占空比的修正,是解决气动薄膜调节阀高低阀位控制效果缺点的有效方法,可作为智能阀门定位器控制算法研究之借鉴。