国产新型智能阀门定位器的设计
智能型阀门定位器已经成为现代过程控制系统的关键设备之一。为了进一步提高定位器的控制性能,研制了一款新型全电子式智能阀门定位器,介绍了该款定位器的主要组成部分和关键核心技术。此定位器采用比例式压电阀作为气动放大与驱动部件,利用自适应等多种智能控制技术,提高了智能阀门定位器的定位精度和抗干扰性能。该定位器具有功耗低、集成度高和运行可靠性好等优点,推动了国产电子式智能阀门定位器产业的发展。
目前,在对安全防爆具有较高要求的工控领域中,智能型阀门定位器的应用越来越广泛。按照工作原理及实现方式的不同,主流智能型阀门定位器大体上分为喷嘴挡板机电式智能阀门定位器、压电开关式智能阀门定位器和压电比例式智能阀门定位器3大类型。上述产品在工程应用和市场竞争中各具特色。其中,以压电开关式智能阀定位器较为流行[1-2]。
北京京仪集团研制的全电子式智能阀门定位器,采用比例式压电阀作为I/P转换和气动放大部件,硬件电路设计突出超低功耗理念,整体布局采用优化设计,降低了硬件电路的电流总消耗。试验证明,在4mA低电流供电且出现10%波动的情况下,硬件电路仍能正常工作,大大提高了定位器工作的可靠性。
1、总体设计
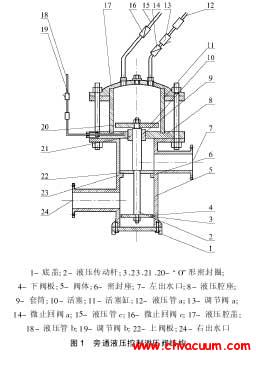
新型全电子式智能阀门定位器的系统由前端与电源、反馈(位移传感器与反馈连杆等)、输出驱动、I/P转换(压电阀)、人机交互(LCD显示与按键)和报警输出等几部分组成[3-4]。整个系统结构如图1所示。
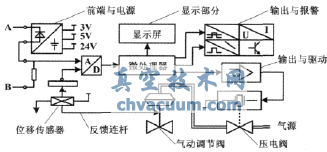
图1 智能阀门定位器结构图
来自上位机的4~20mA(或其他制式信号)电流信号,利用稳压二极管完成I/V转换和一级简单稳压,随后通过DC-DC线性稳压模块、电荷泵或开关式升压模块,分别产生3V、5V和24V等几组电压,供CPU、外设硬件电路及压电阀驱动电路使用。同时,利用传感器电路,获取与输入电流i呈线性比例关系的电压信号。该信号通过前向数据传输通道送往MSP430微处理器片上A/D端口或外接A/D转换器端口,完成控制信号的采样与数据处理。
气动执行机构阀位位移反馈量通过反馈连杆、齿轮组和精密位移式电位器来完成位移-电压变换,并通过反馈传输通道,完成反馈信号的采样与处理。在CPU中,将控制信号采样值与反馈信号采样值进行比较,再经过一系列复杂的控制算法,产生相应大小的输出控制量。该控制量通过MSP430片上模块实现实时输出,并经过由精密放大器件组成的驱动电路直接驱动压电阀和气动放大器,以调节气动执行机构的行程,即阀门的开度。
LCD液晶显示和4个按键则是定位器“人-机”信息和数据交互的窗口,可以完成变量和相关参数的初始值设置、数据组态及实时显示等诸多功能。输出报警模块完成系统异常监控,并产生远端报警输出。
另外,为了增大重要数据的存储容量,增加了片外EEROM,并利用模拟I2C通信技术与单片机实现双向数据交互。
2、硬件电路设计
智能阀门定位器硬件电路原理如图2所示[3]。
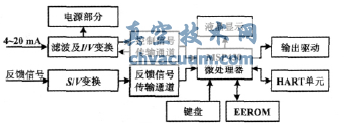
图2 定位器硬件电路原理图
各单元电路组成及功能如下。
①滤波及I/V变换电路是电源和控制信号的共同输入端,是整个硬件电路的前端和基础。设计中采用高性能滤波器,配合低阻抗线绕电感,有效抑制了4~20mA电流信号及电路板上的各种传导干扰和高频干扰。同时,增加肖特基二极管、防雷压敏电阻等,使前端输入通道具有良好的二次保护功能。
由于定位器电源电路串接在4~20mA电流环路内,因此,选用了稳压范围宽、吸纳电流较强的齐纳二极管,实现了I/V转换。这样即使输入电流在较大范围内变化时,输出电压仍然能够稳定在规定值,为后续的DC-DC变换和升压模块提供了比较稳定的输入电压源。
②电源模块,电子式智能型阀门定位器需要3V、5V和24V等几组电压源。3~5V电压变换采用了具有较大输入范围和较高转换效率的电荷泵完成,其具有很高的电能转换效率(一般在90%以上);24V升压部分则利用了DC-DC开关升压技术,利用高性能、低功耗专用芯片作为核心设计实现。电源模块采用综合调制技术,不仅降低了静态电流的消耗,而且实现了输出电流值根据负荷大小自动调整的功能。
③检流与前向输入通道采用低端检测法,同时串联了一个具有良好温度特性的线性检流元件,以获取与控制信号具有近似线性关系的电压Uab。该电压通过差动放大调理后,送入微处理器进行采样与数据处理。
为了减少温漂对系统测量精度的影响,电流检测电阻选用了热稳定性好、漂移小的康铜合金检流器件。此外,设计中采用综合措施,消除并抑制了共模干扰和噪声干扰;同时,添加了补偿电阻,使输入信号的偏移误差降低到最小。
④位置反馈电路的主要功能是反馈信号的线性调理与放大。定位器控制的实质是闭环负反馈控制,因此,实现位移-电压变换的反馈机构也是定位器重要的组成部分。
位移-电压变换部分由反馈连杆、精密齿轮组和精密导电塑料电位器等组成,主要完成气动执行机构阀位反馈行程到电压信号的转换。其中,精密齿轮组可以将气动执行机构行程的角位移放大若干倍,提高反馈信号的精度。由于正/反行程的一致性对控制精度具有较大影响,所以对工艺设计与精密加工技术提出了较高要求,在软件实现部分采取了补偿措施。
⑤输出驱动部分,使输出数据能够实时同步更新,并能通过高共模抑制比的低功耗驱动单元和I/P转换部件完成对压电阀和气动调节阀的驱动控制。
⑥附属电路包括按键、复位、液晶显示和片外EEROM等单元电路。片外EEROM扩大了存储容量,增加了键盘-LCD、人-机交互窗口,使该产品的设计与操作更加智能化和人性化。
3、软件设计
3.1、系统软件
智能阀门定位器的程序主要由管理、控制和通信软件等几部分组成。其中,PID控制和HART通信程序组成了主程序[4-5]。
管理软件主要完成系统监控和初始化任务,同时还具有CPU、各种片上外设和外围芯片等的设置与初始化、系统自检和PID参数自整定、人-机信息交互以及故障报警输出等辅助功能。
控制软件是软件设计的核心和关键环节,主要完成信号实时采样、数据处理和控制算法处理等核心任务。
通信软件的任务包括两部分:一部分是定位器与上位机控制器之间遵循HART协议的半双工通信;另一部分是CPU与片外EEROM芯片之间遵循I2C协议的串行数据通信以及LCD显示等。两者都采用主从方式工作,以中断方式进行数据的发送和接收,既确保了数据的实时传输,又提高了CPU工作效率。
主程序流程图如图3所示。
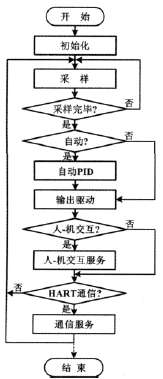
图3 主程序流程图
3.2、HART通信
HART通信是一种半双工的通信模式,由主控设备控制命令和数据的传输,采用主从应答式通信。为了提高CPU的利用效率,下位机利用MSP430的串行通信模块,以中断方式进行命令与数据帧的发送与接收。
在接收中断程序中,下位机对上位机命令帧进行接收、识别,判断是否接收到正确的前导符和定界字符以及字符间隔是否超时,并设置收到的信息帧的类型,如发送帧、应答帧或突发帧等,接着接收信息帧的其余部分,直到接收完毕。一旦接收完毕,发送中断程序便将要发送的应答帧或数据帧依次送入发送缓存。当已经建立链接且物理层允许发送时,CPU自动启动信息或数据的发送,若发送完毕或出现错误,则进入终止发送状态,完成一次命令的交换。每次传送完毕命令帧或数据帧后,必须停止总线上的FSK载波信号,以便其他主控设备、站点占用该通信线路。同时,为了减小误码率,通信中采用了“垂直+水平”的校验方法,提高了通信质量。
HART通信中断程序流程如图4所示。
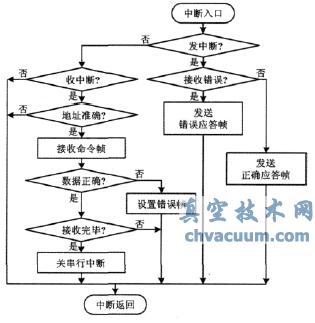
图4 中断程序流程图
4、关键及核心技术
4.1、超低功耗技术
为了使定位器在4mA甚至更低电流的极限条件下仍能正常、可靠运行,在系统设计中采取了一系列综合措施,以降低系统功耗。首先要处理好前端I/V变换等过程的能量损耗问题;其次,重点做好低功耗集成运放的选型和参数匹配工作;最后,在程序设计中采用了“睡眠+中断唤醒”模式[6-8]。
经过综合测试,系统能正常工作的电流总消耗降低至3mA左右。
4.2、自适应PID控制算法
气动执行机构及阀门是一个典型的严重非线性、大滞后的控制对象,要实现精确定位(定位精度0.5%),控制难度较大,主要原因在于:不同规格的气动执行机构及阀门,其指标参数往往差异很大,譬如执行机构的行程、摩擦力和时延等,即便是同一套系统,随着时间的推移,某些性能参数也会发生较大的改变。
对此,设计中采用了PID自适应控制算法。该算法具有很强的自适应控制能力,不仅初始参数能够在线地自动整定,而且阀位调节和控制过程为基于系统辨识的自适应控制。根据控制对象特性参数的变化,在线实时调整PID控制策略和KP、KI、KD等控制参数值,提高了响应速度、定位精度和抗干扰能力[9]。
5、结束语
随着总线和网络技术的发展,能够实现远程控制的智能型阀门定位器已经成为现代过程控制系统中的核心部件之一。因此,发展全电子式新型智能阀门定位器具有重要的战略意义。
本项目所研发的压电比例式智能阀门定位器属于实用新型产品。该产品具有优良的超低功耗性能和很高的自适应控制能力;其独特的单只压电阀设计,不仅提高了产品运行的可靠性,也降低了生产成本,提升了产品的市场竞争能力。该产品的研发,为推动国产新型全电子式智能阀门定位器产业的发展起到了积极作用。
参考文献
[1]胡寿松.自动控制原理[M].3版.北京:国防工业出版社,1999.
[2]长阪文雄,本田善郎.智能式阀门定位器SVP3000Alphaplus的开发[J].世界仪表与自动化,1998,2(6):65-69.
[3]蔡明.ZPZD3100型智能阀门定位器的原理与设计[J].自动化仪表,2008,29(11):46-47.
[4]林惠.智能电气阀门定位器的研究开发[D].天津:天津大学,2003.
[5]逯大军.基于HART协议的低功耗智能电气阀门定位器[D].天津:天津大学,2006.
[6]胡大可.MSP430系列FLASH型超低功耗16位单片机[M].北京:北京航空航天大学出版社,2002.
[7]魏小龙.MSP430系列单片机接口技术及系统设计实例[M].北京:北京航空航天大学出版社,2002.
[8]潘卫江,胡大可.MSP430单片机Flash存储器的特性及应用[J].单片机与嵌入式系统应用,2001(4):38-41.
[9]陶永华.新型PID控制及其应用[M].2版.北京:机械工业出版社,2003:8-10.