电厂电动执行机构软启动器设计
为了减小电动执行机构启动时对机械装置的冲击,同时可以控制大力矩电动执行机构的启动,提出了一种通过AVRATmega128单片机控制晶闸管调压的三相交流异步电机软启动器,并分别介绍了其硬件组成和软件设计。实验结果表明了软启动器硬件设计以及软件设计的正确性,达到了控制电机定子两端电压的效果。
电动执行机构作为电厂电动阀门的动力装置,是电厂自动化仪表中的执行单元,目前应用非常广泛,但也存在不少问题。现电厂多回转电动执行机构多采用三相交流异步电机,其传统的启动方式是将三相交流异步电机通过正反转模块或交流接触器直接接到电网上。这样启动电流大,容易对电网和执行机构本身造成损害。在许多场合这种过大的启动电流会对整个传动系统造成不良的影响。为了满足电动机自身启动条件、负载传动机械工艺要求、保护其他用电设备正常工作的需要,应当在电机自身启动过程中采取必要的措施控制其启动过程,降低启动电流冲击和和转矩冲击。现国内针对电动执行机构的晶闸管软启动器技术研究不多,已有的软启动器结构简单,采用三路晶闸管控制,可靠性不高且启动方式单一,不适合用于大力矩的电动执行机构。采用六路晶闸管控制比三路晶闸管控制具有更高的可靠性,且可以根据负载调节启动方式,可大力矩执行机构平稳启停,限制启动电流,减少机械冲击,减弱对传动机构的磨损,提高了设备的安全性和可靠性。文中在电动执行机构的基础上,以ATmega128单片机为控制核心,分别控制六路晶闸管的导通角从而调节执行机构三相异步电机两端的电压,满足阀门的软启动需要。
1、系统总体架构
该软启动装置是由一片处理器(ATmega128)控制六路晶闸管实现对电动机定子两端电压进行控制,用以达到软启动的功能。利用电流传感器对起动电流进行幅值检测,通过电压检测电路对三相电进行相序检测和过零检测,利用正反转模块实现电机正转反转的切换。整个系统用变压器将强电弱电隔离,并且通过后级电路进行整形滤波后对控制系统、晶闸管驱动电路以及正反转模块供电。整个系统总体构架如图1所示。

图1 系统总体构架
2、系统的硬件电路设计
2.1、系统主回路
软起动器主回路采用图2所示的三相交流调压电路。在电源和异步电动机之间接入反并联的晶闸管调压电路,通过改变晶闸管触发角来改变电动机定子两端电压,进而改变电机的转速和定子电流等物理量。由于图2所示的电路中没有中线,因此工作时若负载电流流通,至少要有两相构成通路,其中一相是正向晶闸管导通,另一相则是反向晶闸管导通。为了保证电路起始工作时有2个晶闸管同时导通,以及在感性负载与控制角较小时仍能保证不同相的2个晶闸管同时导通,文中的设计采用了能产生大于60°的宽PWM脉冲触发电路。
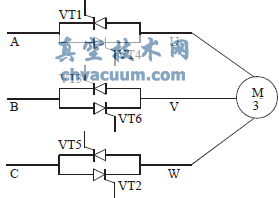
图2 软启动系统主回路
2.2、系统电源电路的设计
电源模块主要完成控制系统各单元的供电,其性能好坏直接影响系统的可靠运行。根据系统的要求,采用电源输入工频变压器后级加六路隔离变压器驱动晶闸管的整体方案。电源变压器提供20W的输出能力作为控制系统总的供电,后级输出+5V,+12V,+24V作为各个单元电路供电。系统电源分配如图3所示。晶闸管驱动板输入输出部分与系统电气隔离,保证系统的安全性。
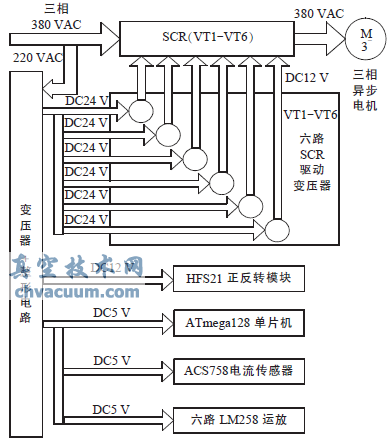
图3 系统电源分配
2.3、系统控制电路的设计
软启动器控制电路以高性能、低功耗8位微处理器ATmega128单片机为控制核心,包括电流检测电路,电压过零检测电路,脉冲触发电路以及正反转控制电路。软启动控制电路结构如图4所示。
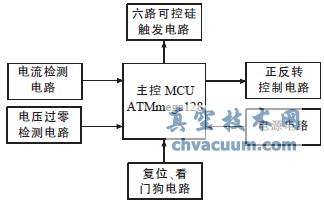
图4 系统控制电路结构
2.4、电压过零检测电路
过零检测电路的作用是把高压过零信号采集后送给单片机,作为单片机定时器的标准。该设计采用光耦与大功率电阻采集高压信号,电阻降压,光耦过零触发。光耦后级接上拉电阻,相电压过零后光耦导通,电平信号有高低会产生变化。单片机通过采集到的电平变化信号来确定相电压过零导通的时间,并且可以通过过零导通的时序对三相电进行相序检测。电压过零检测电路如图5所示。
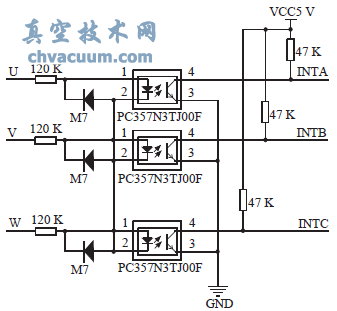
图5 过零检测电路
2.5、晶闸管驱动电路
利用ATmega128单片机发出的六路PWM脉冲控制A,B,C三相6个晶闸管的触发。由于单片机输出触发信号不足以触发晶闸管,故需将PWM脉冲触发信号通过晶闸管触发变压器将触发功率放大。由于主电路中没有中线,为了保证可控硅的导通以及触发时序的正确,在同一时刻必需有2个晶闸管导通。考虑到可靠性的要求,该设计采用大于60°的宽PWM脉冲列触发信号。
脉冲驱动电路如图6所示,单片机发出一串宽PWM脉冲,经过三极管进行功率放大,然后将放大信号通过晶闸管触发变压器使晶闸管控制极和阴极之间加正向电压,从而触发晶闸管导通。
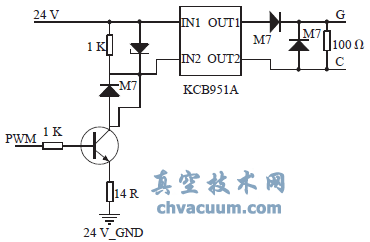
图6 晶闸管触发电路
3、系统软件设计
软启动器的软件主要包括系统主程序和中断脉冲触发程序,并采用模块化设计。
3.1、系统主程序设计
系统主程序主要包括系统上电初始化、缺相检测、电机正反转控制、软启动与软停车模式选择、软启动控制方式的选择,以及按预定方式实现电机软启动。主程序流程如图7所示。
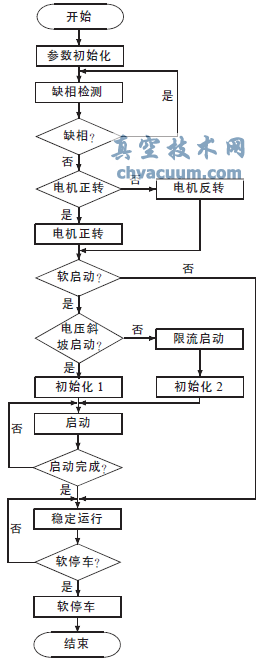
图7 主程序流程
3.2、中断脉冲触发程序
由于晶闸管触发变压器本身伏秒特性的限制,不能给出宽脉冲触发信号,故该设计采用宽PWM触发脉冲,即给需要导通的晶闸管1个大于60°的PWM脉冲列,这样可至少保证两相之间构成通路,并且该触发方式比双脉冲触发方式有更高的可靠性。设计中PWM脉冲频率为5kHz,占空比25%。
ATmega128单片机通过3个外部中断INT2,INT6,INT7分别检测到电压过零检测电路送来的相电压过零中断信号,并按照触发角的变化延时相应的角度,给出触发信号,然后延时大约3.5ms停止触发脉冲的发送。利用单片机的2个16位定时器/计数器T/C1和T/C3的定时功能,将T/C1和T/C3的工作模式设置为快速PWM模式,利用定时器比较匹配中断和溢出中断实现脉冲列的定时。同时利用定时器/计数器T/C0实现触发角和脉冲列宽度的定时。其中A相中断脉冲触发程序流程如图8所示。
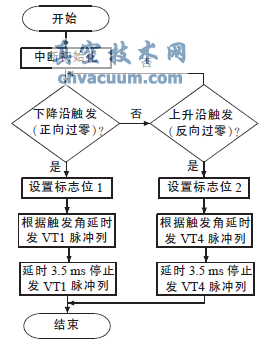
图8 A相脉冲触发程序流程
4、实验结果及分析
根据上述软硬件设计方案,设计并制作了1台电动执行机构软启动器样机并进行实验。三相异步电机额定功率为1.5kW,额定转速为1440r/min。图9为晶闸管VT1与VT6触发脉冲列的关系,脉冲列宽度为3.5ms且VT6脉冲列比VT1脉冲列超前60°。由于A相正半周期和C相负半周期相位差60°,按照触发顺序,在A相导通的同时,需同时将C相导通,这样就保证两相之间构成了通路,说明了触发脉冲相序的正确性。
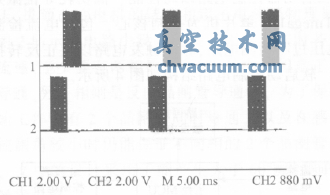
图9 晶闸管VT1与VT6触发脉冲关系
图10为当触发角为90°时,输出线电压Uab与晶闸管VT1触发信号之间的关系。图11为当触发角为90°时,负载相电压Ua与晶闸管VT1触发信号之间的关系。图12为A相负载电流的变化情况。从相电压Ua及相电流Ia的波形可以看出加在电机定子两端之间的电压电流发生了变化,说明软启动器起到了调压调速的效果,同时表明单片机输出的脉冲列通过隔离、放大之后可以成为可靠触发晶闸管的触发脉冲信号。
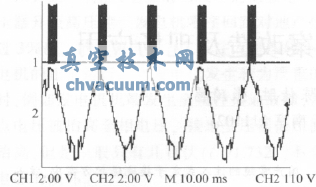
图10 α=90°线电压Uab与VT1脉冲列的关系
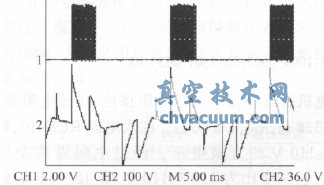
图11 α=90°相电压Ua与VT1脉冲列的关系
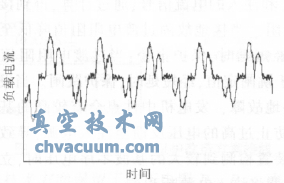
图12 α=90°A相负载电流变化
5、结束语
提出了一种采用六路晶闸管控制有多种启动控制方式的电动执行机构软启动器,并介绍了其硬件组成和软件设计。文中所做的工作验证了其硬件电路设计的可靠性和中断触发程序的正确性,为下一步电动执行机构软启动器多种控制方式的研究做准备。