变频调速在智能电动执行机构控制部分的研究
本文分析了国内外电动执行机构的研究现状和发展趋势,并在国内现有同类产品基础上,应用变频调速技术、单片机技术、微电子技术,开发了集执行机构、驱动单元调节控制单元、现场显示仪表等为一体的机电一体化现场总线型智能电动执行机构。本文主要论述变频调速在电动执行机构中的应用。
智能电动执行机构是工业自动化系统中的执行单元。它以电动机作为动力源,将控制信号转换成相应的动作来控制阀门的位置。本文分析了国内外电动执行机构的研究现状和发展趋势,并在国内现有同类产品基础上,应用变频调速技术、单片机技术、微电子技术,开发了集执行机构、驱动单元调节控制单元、现场显示仪表等为一体的机电一体化现场总线型智能电动执行机构。智能电动执行机构从结构上主要分为控制部分、执行驱动部分、信号检测部分。控制部分主要由单片机、EPROM、PWM发生器、IGBT逆变器、整流模块、开关量输入输出通道等组成;执行驱动部分主要包括执行电机和机械传动部分。本文主要论述变频调速在电动执行机构中的应用。
目前,变频调速已广泛应用于石油化工、家电等诸多领域,在变频调速的控制理论不断发展的同时,与之相应的控制手段和技术也朝着数字化与软件化方向迅速发展。电力电子技术的发展为交流调速奠定了物质基础,电力电子器件正在向大功率化、高频化、模块化、智能化方向发展。所以变频器在满足各项性能指标的同时,减小体积、简化控制、降低成本是目前面临的问题之一。当前应用比较广泛的控制方法虽然控制效果比较好,但过于复杂。本文设计的变频器专门针对小功率电机,具有体积小,成本低的优点。
1、变频驱动阀门调节的意义
要实现阀位的精确、快速调节,要求执行机构既能带动阀门缓慢启动,启动阶段结束后又能逐渐升速,缩短响应时间,提高调节速度,在接近设定阀位时又能降低速度,缓慢到达指定位置而无超调,在带动阀门至全关和全开位置时,既能避免阀门打开过度或卡死等现象,也能保证其完全打开和关闭。
显然,目前一般的电动执行机构是难以满足上述要求的。将变频技术应用于电动执行机构,不但能圆满的解决上述问题,而且使阀位的调节质量有质的提高。在调节过程中,阀门运行的速度和力矩都是变化的。在开启阀门时,变频执行电机的软启动功能使电磁转矩及转速逐渐增加,实现阀门的平稳开启,可以减小或消除电流及机械冲击;阀门开启之后,执行电机转速逐渐升高,保证对设定阀位的快速响应;将要到达设定位置时,为使其迅速精确的定位,执行电机的速度降低,使阀门缓慢到达设定位置而不产生超调,同时避免阀座和阀芯之间产生撞击。在容易产生液压冲击的场合,还可通过改变执行电机转速以减缓阀门关闭速度,延长关闭时间,减小或消除液压冲击。
这样,变频执行电机带动阀门以变化的、符合需要的速度运行大大提高了阀位调节的精度和可靠性。整个调节过程既快速、精确,也能柔性启停,十分圆满的解决了常规恒速执行机构的弊病。
变频调速技术在执行机构中的应用,极大的消除了传统执行机构的缺陷,可以说是执行机构技术的一次飞跃。
2、变频调速回路的工作原理及系统设计
2.1、变频调速系统结构
变频调速系统包括主电路和控制电路。主电路中最重要的部分是三相逆变桥的构成,控制电路中最重要的部分是变频控制信号PWM波的生成。为了能使系统硬件电路简单、尺寸小、可靠性高和开发时间短以及占用单片机机时少,本文选择能产生PWM波的应用于电机变频调速的PWM发生器SA4828作为控制器件IGBT逆变模块作为逆变功率器件。
变频调速系统主回路为交直交电压型变频电路,它由二极管整流模块VDM、直流滤波电容和IGBT逆变模块组成。
2.2、变频调速系统主电路设计
电机参数为额定功率0.75kW,额定电流2.1A,额定电压380V。
整流器的输入电压为单相工频交流电,当没加滤波电容时,单相桥式整流电路输出的平均直流电压为:
由Udc=0.9U1=0.9×220=198V
加上滤波电容后,Udc的最大值可达到交流线电压的峰值:
2.3、整流二极管模块的参数计算
整流二极管的选择应从电机在最大负载电流下仍能可靠工作的情况下考虑。所以流过二极管的电流有效值为:
式中,Im为电机最大负载电流峰值,其值一般取为电机额定电流的5-6倍。故二极管的额定电流为:
二极管的耐压值为:
式中,U21为变压器二次线电压有效值。
2.4、滤波电容的选择
当输入单相线电压为220V时,整流输出的最大电压是311V,考虑到电压为10%的波动,则最大输出可达342V,因此滤波电容的耐压值应在此电压之上,并有一定的安全裕度,故取滤波电容的耐压值为450V。理论上,滤波电容的值越大越好,但考虑到体积成本等因素,电容值也不可能选得太大,事实上,中间直流滤波电容的容量是从限制电压波动的角度来选择的,根据经验,可选3个450μF的铝电解电容。
2.5、逆变器功率器件的选择
IGBT是场控型大功率开关元件,它热时间常数小,承受过载能力差在实际应用时,从负载最严重的情形来选择功率元件。
功率元件的电流额定值:
式中,λ——电机的过载系数,一般取1.5~2;In——电机的额定电流。
此外,还应保证功率器件IGBT的集电极-发射极额定承受电压Uceo至少应为实际承担的最高峰值1.2倍以上,则功率器件的耐压值:
所以选择IPM为600V/20A的智能功率模块,经比较多种型号的IPM,最终采用三菱公司的PM20CSJ060。
2.6、控制系统的硬件设计
控制系统是以计算机为核心的测量和控制系统。整个控制系统由传感器、过程输入/输出设备及执行机构等部分组成。由系统对各种工作状态进行实时数据采集、处理并对其实施控制,从而完成自动控制任务。
单片机由于其集成度高、体积小、可靠性高、性能价格比好等优点广泛应用于智能仪表、测控系统、数控机床、计算机系统的智能接口以及家电方面。智能执行机构从结构上主要分为控制部分、执行驱动部分以及信号检测部分。控制部分主要由单片机、EPROM、PWM波发生器、IPM逆变器、A/D转换模块和整流模块等组成;执行驱动部分主要包括执行电机和机械传动部件;检测部分主要包括直流电压检测、交流电流检测和阀位检测。
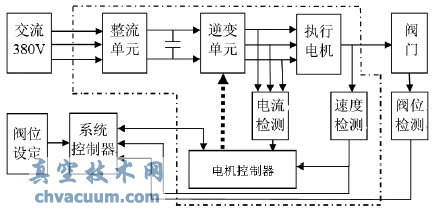
EPROM用于存放程序和表格;8255扩展并行口用于连接SA4828、动态显示、键盘等外部设备;键盘和显示用于输入和显示设备参数和给定量,显示系统当前位置、运行速度、运行频率等参数。我们选择较为熟悉的8位单片机89C51作为智能执行机构的控制核心。在智能电动执行机构中单片机担负控制系统的信号处理:接收系统对转矩、阀门开启、关闭及阀门开度等设定信号,并提供三相PWM波发生器SA4828所需要的控制信号;处理IPM发出的故障信号和报警信号;处理通过模拟输入口接收的电流、电压、位置等检测信号;提供显示电动执行机构的工作状态信号;执行控制系统来的控制信号,向控制系统反馈信息。整个电动执行机构的拓扑结构如下图所示,本设计的主要任务为虚线框内部分。
3、系统软件设计
在本文系统软件的编写过程中,遵循的原则是:软件要最大限度地与硬件配合,充分发挥各自的功能以满足控制系统的需要。原则上,在系统允许的情况下,尽可能采用软件,减少硬件的使用。因为这样可以节省经费开支,减少因硬件的增加而降低系统可靠性的隐患,并且软件设计灵活、方便、易于修改,在许多方面可以取代甚至超过硬件的功效。但是这种“以软代硬”是以占用更多的计算机机时为代价的。虽然减少了元器件的数目但系统的工作速度相应降低,这在某种实时性要求较高的场合是不允许的;而在实时性要求不是很高的场合则更具优越性。
4、结论与展望
本文基于简化的矢量控制策略,以89C51单片机、PWM产生器SA4828和PM20CSJ060为核心,以简洁、可靠的系统构成,采用全数字化的方式,实现了电动执行机构的变频驱动,基本解决了阀门损坏、卡死等问题和传统阀门调节的稳定性和灵敏度之间的矛盾,优化了阀门速度调节特性。







