水下球阀用液压执行机构设计
介绍了一种水下球阀用带接口的单作用液压执行机构,分析了液压执行机构的工作原理,通过设计计算确定其基本参数,给出了水下球阀用液压执行机构的设计方案。
1、概述
随着海洋石油天然气工业的发展,以及海洋石油天然气的勘探和开发向深水区域迈进,水下生产系统已经成为一种重要的深水开发模式。在早期,水下阀门主要的形式是闸阀,但随着深海油气田的发展和对大孔径、高压力阀门需求的增加,球阀在深海环境的应用越来越广泛。本文介绍一种水下球阀用带水下机器人( ROV) 接口的单作用液压执行机构。
2、工作原理
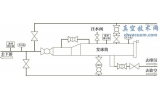
在正常工况下,执行机构通过液压缸驱动阀门关闭,通过复位弹簧开启阀门。在调试或液压源故障时,通过ROV 接口驱动。水下球阀执行机构由液压驱动机构、弹簧复位机构、ROV 驱动机构、压力补偿器和位置指示器等( 图1) 组成。
执行机构每个腔体设置了压力补偿器。补偿器采用金属膜片盒式结构,金属膜片一侧通海水,另一侧连通执行机构各个腔体。由于执行机构腔体内充满了介质,当金属膜片受到海水压力作用时发生弹性变形,使得执行机构腔体内的压力与海水压力相等,从而可以采用更为轻薄的壳体结构,同时也可以简化密封结构。
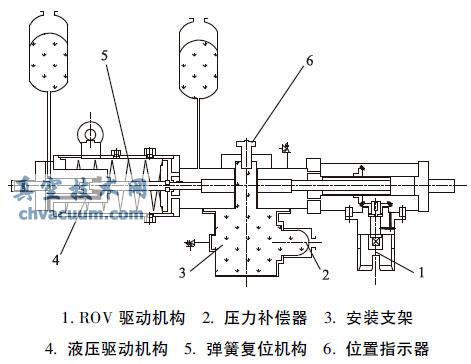
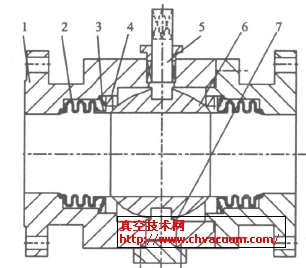
图1 水下球阀执行机构
为满足ROV 操作的需求,执行机构设置了可视化位置指示器,可通过ROV 的水下摄像机观察指示机构位置进行相应操作。球阀执行机构的位置指示器设置在顶部,直接与输出轴相连,可显示输出轴转动的角度。
水下球阀执行机构采用单作用液压缸,依靠液压力和弹簧力分别驱动往复动作,以实现开启/关闭的功能。执行机构有两种工作方式,即液压操控和ROV 操控。
液压操作阀门开启时,液压油通过油管进入执行机构的油腔内,推动活塞向左移动,活塞端部连接的传动杆及齿条随之运动,齿条通过球阀阀杆上的齿轮转动阀杆,驱动球阀关闭。在整个活塞左移的过程中,弹簧不断被压缩,通过液压缸左端的限位螺钉限制执行机构的最大行程。当阀门需要打开时,卸掉油腔内液压油压力,弹簧的弹力克服阀门的开启力和活塞与缸体内壁的摩擦力,使得活塞向右移动,直到弹簧恢复初始状态,阀门完全打开。
ROV 操作阀门关闭时,首先ROV 机械臂与水下执行机构ROV 接口连接,在ROV 机械臂顺时针力矩的作用下,ROV 接头通过齿轮及轴套驱动螺杆旋转,在传动螺母作用下螺杆向左运动,推动齿条向左运动,齿条通过球阀阀杆上的齿轮转动阀杆,驱动球阀关闭。ROV 操作阀门开启时,ROV 机械臂逆时针旋转,螺杆向右运动,在弹簧回复力的作用下齿条带动阀杆旋转,实现阀门开启。
4、结语
设计中重点对液压操控端及ROV 操控端进行了计算,确定了主要设计参数并对传动比以及螺杆强度进行了校核,证明是一种可行的水下球阀用液压执行机构解决方案。