少齿差行星齿轮传动在小转矩核级阀门电动装置上的应用
通过SDZH小转矩多回转核级阀门电动装置的成功开发实例,详细地介绍了2Z-X(Ⅰ)型少齿差行星齿轮传动的优点,并进行了传动比、传动效率和齿廓重迭干涉的计算;分析了零件加工误差对齿廓重迭干涉的影响,提出了采用中心距正偏差以及适当加大齿顶圆直径偏差来弥补加工误差对齿廓重迭干涉的影响,为小转矩核级阀门电动装置工业优化设计提供了参考。
一、前言
核级阀门电动装置是应用于核电站等核工业过程控制领域的终端执行设备,可以控制各类核级阀门的开启和关闭,尤其适用于核电站中不宜于直接操作的环境。
由于核级产品有抗震要求,因此设计核级产品时,在满足功能要求的前提下应尽量做到使所设计的产品体积小,重量轻,重心低,而对小转矩(本文所指的小转距范围:对多回转电动装置,输出转矩10~100N·m;对部分回转电动装置,输出转矩50~1000N·m)核级阀门电动装置的体积和重量影响最大的就是其主传动机构,目前(核级)阀门电动装置的主传动绝大部分是采用蜗杆传动,虽然也能实现较大的速比,但大速比下,其体积较大,结构不够紧凑,而且传动效率较低。
少齿差行星齿轮传动由于其结构紧凑,传动效率高,承载能力大,运转平稳可靠,噪声小,寿命长且加工方便等特点,目前在工业各领域均有一定的应用,然而,其在核级阀门电动装置领域的应用却鲜有报道。本文成功将2Z-X(Ⅰ)型少齿差行星齿轮传动应用于小转矩核级阀门电动装置的主传动,为核级阀门电动装置的优化设计提供了很好的借鉴。
二、参数选择与设计计算
扬州电力设备修造厂专门为田湾核电站开发的用于逐步替代进口原供电动装置的小转矩SDZH核级阀门电动装置如图1所示,该电动装置主要技术参数与指标如下。

图1 SDZH核级阀门电动装置
1)电源:三相AC380V±10%,50Hz。
2)电动机工作制式:S21,5min。
3)防护等级:IP67。
4)环境条件:环境温度-20~+60℃;常温常压下,相对湿度<95%。
5)技术指标:转矩重复精度为:≤±10%;行程重复精度为:≤±5°。
6)核安全等级:K2/K3。
7)总重量:≤20kg。
8)控制转矩范围:5~15N·m、10~30N·m、20~50N·m。
9)输出转速:10r/min。
10)输出轴最大转圈数:10圈。
由于是替代项目,该电动装置的体积和重量受到了进口原供电动装置的限制,主传动采用了2Z-X(Ⅰ)型少齿差行星齿轮传动后,其传动简图如图2所示。
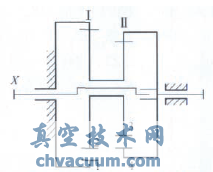
图2 2Z-X(Ⅰ)型少齿差行星传动简图
1.内齿轮2 2.外齿轮1 3.外齿轮3 4.内齿轮4
电动装置结构紧凑,满足了体积和重量等方面的替代要求。
这里主要从传动比和效率计算以及加工误差对齿轮齿廓重迭干涉影响的角度讨论2Z-X(Ⅰ)型少齿差行星齿轮传动在小转矩多回转核级阀门电动装置上的应用。
1.主传动的构成及参数选择
(1)主传动的构成由一对正齿轮和一个2Z-X(Ⅰ)型少齿差行星传动减速机构构成,如图3所示。
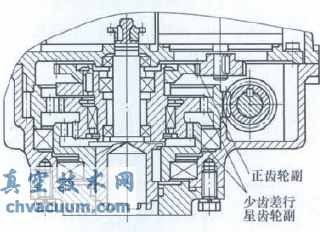
图3 电动装置主传动结构图
(2)齿轮参数选择
1)一级正齿轮副E、F,模数取m=1,齿数分别取为:ZE=42,ZF=93。
2)2Z-X(Ⅰ)型少齿差行星减速齿轮模数及齿数等参数的确定。进行少齿差行星齿轮的参数选择,各参数见表1。
表1 少齿差行星齿轮参数[1]
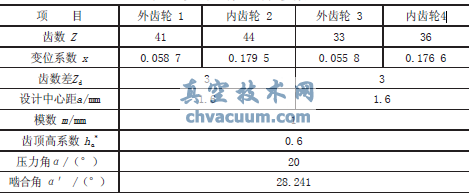
注:内啮合齿轮副内齿轮齿数与外齿轮齿数之Zd=Z2-Z1=Z4-Z3称为齿数差,一般齿数差Zd=1~8称为少齿差。
2.传动比的计算
进行总传动比及其分配计算的目的是选择合适的传动比以满足电动装置的主要技术参数之一—输出转速的要求,传动比的计算如下。
1)一级正齿轮副E、F的传动比iEF=93/42=2.214。
电动装置的总传动比为:i=iEF×iBx1=2.214×61.5=136.16
电动机的额定输出转速一般为1400r/min,由此可知该总传比满足了电动装置输出转速为10r/min的要求。
3.传动效率的计算
行星齿轮传动的效率是评价其传动性能优劣的重要指标之一。试验研究和理论分析发现行星传动的效率有如下特点。
1)行星齿轮传动的效率,随其结构类型的不同而不同。
2)同一型式的行星齿轮传动的效率,随传动比的变化而变化。
3)同一形式的行星齿轮传动,当主、从动件改变时,效率随之改变。
4)行星齿轮传动效率的变化范围很大,高的达0.98以上,低的可接近于零,甚至自锁。
SDZH核级阀门电动装置的主传动比为136.16。其中2Z-X(Ⅰ)型少齿差行星传动部分的传动比为61.5,其主动件为偏心转臂(X ),
输出件为内齿输出轴(内齿轮4),固定件为内齿轮2(如图2所示)。该行星传动的效率计算如下:
(1)一级正齿轮副E、F的传动效率ηEF直接选取ηEF=0.97。
(2)2Z-X(Ⅰ)型少齿差行星齿轮传动效率计算
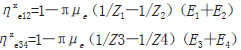
1)第一对内啮合齿轮副1和2的啮合效率η xe12的计算。主要以内啮合齿轮副I(外齿1和内齿2)为例说明,内啮合齿轮副Ⅱ(外齿3和内齿轮4)类同,仅加以必要的说明。
式中E1、E2、μe的数值见表2。
表2 E1、E2、μe的数值
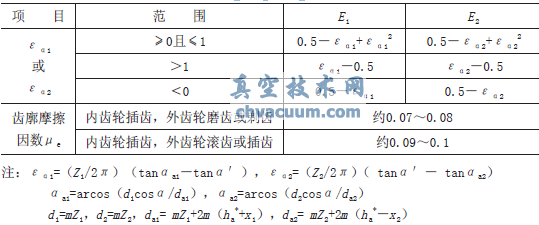
将齿轮参数表中的相关数据代入上述公式计算可得:αa1=24.434°,αa2=16.664°;εα1=-0.54024,εα 2=1.665。由表2可知,E1=1.04024,E2=1.165。
按内齿轮插齿,外齿轮插齿时选取齿廓摩擦因数μe=0.1,则ηxe12=0.9988。
2)第二对内啮合齿轮副3和4的啮合效率ηxe34的计算。将E1、E2、εα1、εα2、αa1、αa2、Z1、Z2、da1、da2、d1、d2中的下标1、2换成3、4,同理将齿轮参数表中的相关数据代入上述公式即可进行E3、E4、εα3、εα4、αa3、αa4的值计算,从而计算出ηxe34=0.9985。
3)2Z-X(Ⅰ)型少齿差行星齿轮传动机构两对齿轮副的啮合效率ηxe14=ηxe12ηxe34=0.9973。
4)2Z-X(Ⅰ)型少齿差行星齿轮传动机构的啮合效率ηε=[1+(ix4-1)(1-η xe14)]-1=0.86。
5)转臂轴承的效率ηb:
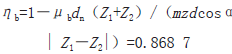
式中 μb——滚动轴承摩擦因数;
dn——滚动轴承内径。
(3) 电动装置的总效率计算η=ηEFηεηb=0.72。SDZH样机的实测效率为0.7,与此效率计算值接近。
4.齿廓重迭干涉计算(Gs)
2Z-X(Ⅰ)型少齿差行星齿轮传动的两对内啮合齿轮副必须分别满足各自的齿廓重迭干涉条件才能避免传动时发生齿廓重迭干涉,
内啮合齿轮副不产生干涉的条件是必须确保Gs12>0与Gs34>0,设计时一般取Gs>0.5。对于内齿轮副I,其齿廓重迭干涉条件Gs12的表达式为:
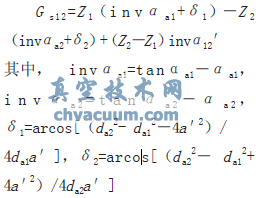
只要将上式中的下标1和2分别置换成3和4,即可得到内齿轮副Ⅱ的Gs34的表达式。
(1)不考虑齿轮加工误差对齿廊重迭干涉验算值Gs12、Gs34的影响将齿轮的相关数据代入上述公式计算可得:
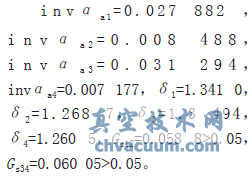
由齿廓重迭干涉验算值Gs12、Gs34的计算结果可知,该少齿差内啮合齿轮传动,在不考虑加工误差的影响时,不会产生齿廓重迭干涉。
(2)分析加工误差对齿廓重叠干涉验算值Gs12、Gs34的影响实际应用中,由于零件加工误差的存在,齿轮啮合时往往还是会出现轻微的干涉现象,使电动装置的噪声增大,效率下降。对齿廓重迭干涉产生影响的加工误差主要有:齿轮的齿圈径向圆跳动、齿轮传动的中心距极限偏差(偏心转臂的偏心距)、齿轮的齿顶圆偏差以及转臂轴承游隙等。
下面就以齿圈径向圆跳动为例来分析齿轮的加工误差对齿廓重迭干涉的影响,四个齿轮均采用8级精度,其径向圆跳动均为Fr=0.045。这个误差将影响到内啮合齿轮副的实际传动中心距。假设实际传动时的中心距为a''r,则a''=a'±Fr。
由啮合角a'=arcos[(a/a'')cosα]可知,实际传动时的中心距a'愈大,则啮合角愈大,愈不易产生齿廓重迭干涉。故只要验证实际中心距a''=a'-Fr时的状态是否干涉即可,假设齿轮的实际径向圆跳动偏差Fr≤0.045。
a''=a'-Fr=1.555,则a'=24.98°,invαa1=0.0298995,δ1=1.33198,δ2=1.26191,Gs12=-0.0534<0。
由以上计算可知,由于齿圈径向圆跳动偏差的存在,就可能使原本不干涉的少齿差内啮合齿轮产生齿廓重迭干涉。所以,为了确保少齿差内啮合齿轮的传动质量,必须采取措施消除齿圈径向圆跳动偏差对齿廓重迭干涉的影响。另外,对齿廓重迭干涉影响较大的加工误差还有中心距极限偏差和齿顶圆直径偏差。在通常的齿轮传动设计中,中心距极限偏差一般按设计手册取正负偏差值,由于中心距取负偏差时,实际中心距减小了,往往导致Gs变小,易产生齿廓重迭干涉;反之,中心距取正偏差时,使Gs变大,不易产生干涉。所以对少齿差内啮合齿轮传动来讲应该采用正的中心距偏差。同理,齿顶圆直径偏差对内齿轮来说应取正偏差,对外齿轮来说应取负偏差相当于齿顶高进一步缩短,可使Gs变大,不易产生齿廓重迭干涉。
所以2Z-X(Ⅰ)型少齿差行星齿轮传动可以采用中心距(甚至可以把齿圈径向圆跳动的影响直接加到中心距上,即取中心距a''=a'-Fr)正偏差以及适当加大齿顶圆直径偏差(内齿轮取正偏差,外齿轮取负偏差)的办法来弥补加工误差对齿廓重迭干涉的影响。
三、结语
由于2Z-X(Ⅰ)型少齿差行星齿轮传动具有承载能力强、速比大、效率高等优点,从而能使所设计的SDZH核级阀门电动装置结构紧凑,体积小,重量轻,重心低,提高了产品的抗震能力。只要在2Z-X(Ⅰ)型少齿差行星齿轮传动的设计中,充分考虑到加工误差因素对齿廓重迭干涉的不同影响,从而在设计上采取相应的补偿措施,就能设计出比较理想的小转矩核级阀门电动装置或少齿差行星减速器。






