长距离输水工程中调流阀精度控制
本文主要介绍了长距离输水调度过程中流量调节阀的精度调节。通过介绍SCADA(即数据采集与监视控制)系统多级控制调度中德国VAG调流阀的三种控制方案的精度区别及误差特点,不仅找到了提高调节精度的解决方法,而且还可为其他类似工程。
1、引言
长距离输水工程的调流阀精度控制一直是困扰水利流量调度一个高难度的课题。对于大型及超大型输水工程,输水管路长,对流量调节的精度要求高。长距离输水工程水力过程非常复杂,给输水调度SCA-DA系统的控制过程提出来了很高的要求。对于重力流输水工程,利用阀门开度增加局部水头损失可降低管道压力和调节管道流量。
本文讲到的大伙房输水工程全线共计十九台调流阀,分布在二百多公里的管线上。调流阀驱动机构均采用英国Rotork公司生产的电动头,此电动头属于智能型执行器,能提供力矩开关、开限位、关限位等硬接点的同时,根据选装还可以配置通信卡,SCADA系统通过通信可以采集电动头的启闭方向、启闭力矩、阀门位置等。同时,通过通信还可以对电动头进行全行程或位置控制。
2、系统概述
本工程上位机系统包括调度中心和调度分中心,下位机系统包括SCADA系统LCU和调流阀控制箱(见图1)。调度中心可以通过调度分中心间接控制SCADA系统LCU,也可以通过备用链路直接控制SCADA系统LCU。SCADA系统配置了双PLC构架,调度分中心通过双网与双PLC进行通信。SCADA系统分别通过IO硬接线和Modbus总线及调流阀控制箱对电动头进行控制。Modbus总线的载体为RS-485,RS-485为现场工业总线,RS-485工业总线为二线制传输,具有抗干扰强、传输距离远等特点,广泛应用在工业控制领域。
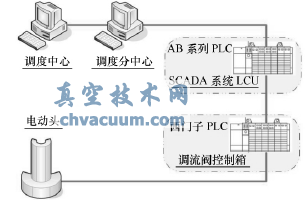
图1 调流阀控制网络拓扑示意
如上所述,控制系统对电动头的控制的安全性是非常高的,所有的链路均为双链路,所有的设备均为主备冗余。但是调节精度因为不同链路的影响而不同。
3、数据交互
调流阀控制箱PLC配置了模拟量模件和2个Modbus通信接口。调流阀控制箱通过1个Modbus通信接口与电动头进行通信。获取电动头的启闭方向、启闭力矩、阀门位置等所有信息及对电动头进行控制。调流阀控制箱配有触摸屏,运行人员可以在现场对调流阀进行控制。SCADA系统LCU配置了开关量输入模件、开关量输出模件、模拟量模件及Modbus通信接口。因为电动头只选配了Modbus通信接口,所以阀门位置信号只有调流阀控制箱的PLC能采集到。
3.1、SCADA系统获取阀门位置信号的途径及特点
(1)通过与调流阀控制箱的PLC进行Modbus通信获得,获得的数值误差为零,但是因为通信造成了时间延迟(3s左右)。
(2)调流阀控制箱的PLC把开度换算成模拟量,通过输出模拟量供SCADA系统采集,时间响应及时(小于1s)。
3.2、SCADA系统获取阀门限位信号的途径及特点
(1)通过IO硬接线信号直接采集,不受调流阀控制箱的PLC的影响,可靠性和及时性都非常高。
(2)通过与调流阀控制箱的PLC进行Modbus通信获得,可靠性和及时性都较差。
3.3 SCADA系统对电动头进行全开全关控制的途径及特点
(1)通过IO硬接线信号直接控制,不受调流阀控制箱的PLC的影响,可靠性和及时性都非常高。
(2)通过与调流阀控制箱的PLC进行Modbus通信控制,可靠性和及时性都较差。
3.4、SCADA系统对电动头进行位置控制的途径及特点
(1)通过IO硬接线信号直接控制,SCADA系统通过模拟量输出模件直接把位置换算成电流信号,调流阀控制箱PLC根据采集到的信号进行控制,此方法不可行,因为调流阀控制箱PLC不容易区分小开度和信号干扰。
(2)SCADA系统把目标开度与调流阀控制箱的PLC通信采集到开度的对比,确定阀门的动作性质,实际的开停是通过IO硬接线来实现的,这种方法的可靠性较好,但是因为Modbus通信的延迟造成误差较大。
(3)SCADA系统根据目标开度与调流阀控制箱的PLC输出的模拟量开度的对比,确定阀门的动作性质,实际的开停是通过IO硬接线来实现的,这种方法的可靠性较好,时间延迟造成的误差也很小。
(4)SCADA系统把目标开度通过Modbus通信直接下发到调流阀控制箱的PLC里,调流阀控制箱的PLC再把此值直接下发到电动头里,电动头根据当前位置进行自动调节控制。实际的开停是通过电动头自己来实现的,这种方法因为全是通信控制(需要进行控制确认的逻辑判断)所以可靠性不是很高,停阀等动作响应比较迟缓,但是误差很小。
根据上述特点,选择不同的方式可以配比出来几种不同的方案,SCADA系统经过多次调试得出结论,全行程的控制采用IO硬接线进行直接控制较合理。位置控制的控制方案有三种选择,另外开发微调功能,弥补精度调节的不足。
4、控制方案
4.1、基于通信采集的开度
本方案开度误差在1%~1.7%之间,其中也受电动头自身误差(大于等于1%)的影响。
首先,SCADA系统根据设定的目标开度,并与调流阀当前开度(由调流阀控制箱PLC通信送来)进行比较,确定调流阀开度需要增大还是减少;SCADA系统通过I/O信号线控制电动头的开、关、停(此步无误差)。SCADA系统在线比较设定开度和实际开度,当实际开度达到设定开度时,停止调流阀开(或关)操作(经调试观察,本方式开度误差在1.2%~1.7%之间)。
开阀过程:首先SCADA系统通过I/O信号线给阀门发送开启命令,并通过modbus总线监视阀门的开度,当开度达到预设值时,通过I/O信号线给阀门发送停止命令。
这种方案的优点是电动头对SCADA系统开关阀命令的执行很到位,但是停阀命令的执行会有一定延迟,对阀门开度造成0.5%以内的误差。调流阀控制箱设备的故障对开关停阀门的影响较小,在调流阀控制箱设备故障的时候也能及时进行开关停阀控制(只是实现不了开度的预置),安全性较好。缺点是开度误差较大,不满足工程调节要求。本方案只能实现调流阀的简单开关停及预置开度控制,精度比其他两种方案差,响应速度也比较迟缓。如图2所示。
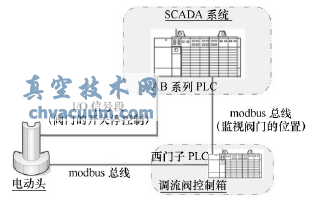
图2 基于通信采集的开度的控制方案
4.2、基于模拟量采集的开度
本方案开度误差在0%~0.4%之间,其中也受电动头自身误差(大于等于1%)的影响。
首先,SCADA系统根据设定的目标开度,并与调流阀当前开度(由调流阀控制箱PLC的模拟量送来)进行比较,确定调流阀开度需要增大还是减少;SCADA系统通过I/O信号线控制电动头的开、关、停(此步无误差)。SCADA系统在线比较设定开度和实际开度,当实际开度达到设定开度时,停止调流阀开(或关)操作(经调试观察,本方式开度误差在0%~0.4%之间)。
开阀过程:首先SCADA系统通过I/O信号线给阀门发送开启命令,并通过调流阀控制箱PLC反送上来的模拟量监视阀门的开度,当开度达到预设值时,通过I/O信号线给阀门发送停止命令。对于运行越慢的阀,误差也越小。
这种方案的优点是电动头对SCADA系统开关阀命令的执行很到位,停阀命令的执行响应也比较及时,对阀门开度造成0.4%以内的误差。此误差可以通过微调功能进行小范围调节,最终误差可以控制在0.1%以内。调流阀控制箱设备的故障对开关停阀门的影响较小,在调流阀控制箱设备故障的时候也能及时进行开关停阀控制,安全性较好。缺点是本方案只能实现调流阀的简单开关停及预置开度控制,同时对调流阀控制箱PLC有一定的依赖性。综合其他两种方案的优缺点,本方案是最优越的。如图3所示。
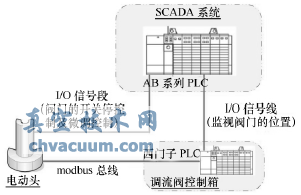
图3 基于模拟量采集的开度的控制方案
4.3、基于通信开度的直接写入
Rotork执行器内部装有死区微调电位器,用来调整执行器的死区,死区在运行中非常重要,认真地确定好死区,可减小执行器的振荡,以延长执行器的寿命[4]。根据死区设置的大小不同,本方式开度调节误差0.1%~10%之间。将死区参数设为最小即可达0.1%的误差。
第一步,SCADA系统通过modbus总线首先把开度发送给调流阀控制箱(此步无误差)。
第二步,调流阀控制箱再通过modbus总线把开度设值直接发送给电动头,智能型的电动头具备自我调节的能力,它按照相应的开度进行开启或关闭。
这种方案的优点是SCADA系统控制简单,总误差为0.1%,精度比其他两种方案高,且精度不受阀门大小的限制。缺点是因为modbus通信影响,接受命令的响应迟缓,需要增加确认标志控制命令的下发。另外需要通过modbus通信的停命令实现阀门的停阀操作。所以停阀的响应也是比较迟缓的。安全性较其他两种方案差。如图4所示。
4.4 、基于脉冲开出的微调
为了弥补第二种控制方案的不足,SCADA系统增加微调功能。通过上位机系统直接下发一个带脉冲时间的开出命令。SCADA系统的下位机PLC通过开出模件把500ms的开出命令发出,继电器执行500ms的动作。电动头接受到后进行点动运行,通过微调可以实现阀门逐步接近目标开度。经过多次调试,验证误差能控制在0%~0.1%以内,而且微调功能不受其他方案和调流阀控制箱PLC的限制。
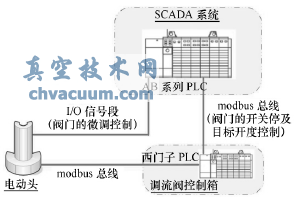
图4 基于通信开度的直接写入的控制方案
5、方案比较
根据运行要求,需要选择两种可行方案作为调流阀调节的控制方案。第一种方案因为误差较大,需要多次微调才能达到目标要求,另外对于小开度的调节比较困能,故这种方案实用性不高。第二种方案调节精度在0%~0.4%之间,它响应时间快,安全性较好,对于精度的误差可以通过微调功能进行调节。所以实用性较高。第三种方案调节误差固定为0.1%,精度满足要求,但是响应迟缓,停阀操作不及时,安全性不高。综合以上问题,把第二种方案作为主方案配合微调使用,同时把第三种方案作为备用方案是比较合理的。在上位机增加方案选择按钮,SCADA系统PLC根据上位机下发的方案选择来确定使用哪种方案。