基于模糊PID的风阀控制器的研究与仿真
目前许多领域中,电动风阀具有重要的应用场合,在工程中得到了广泛的关注。为了检测调节阀在不同工作环境下的机械及电气特性等性能,需要有一套完整的阀门测试与控制系统。为达到系统性能指标要求,需进行诸如振动、冲击、热平衡等试验。通过检测阀门位置及管道中的介质流速,利用步进电机驱动阀门碟片转动进行位置控制。由于步进电机转动角度和碟片的转动角度之间不成比例,电机转动输入与阀门对应角度输出呈非线性关系,采用常规的控制方法难以获得令人满意的控制效果。
模糊逻辑控制器(fuzzylogiccontroller,FLC)是从Zedeh提出的模糊集概念发展起来的,适用于无法得到准确数学模型、多输入、具有不确定因素、非线性系统的控制。因此,把模糊控制和常规PID控制有机地结合在一起,通过在步进电机转轴上安装位置传感器,采用模糊PID控制方案对步进电机进行双闭环控制,以精确地控制阀门的开度。针对这种情况,本文论述了一种由PID参数设计推导得到Fuzzy-PID参数的方法,结合电动风阀的综合控制要求,进行了系统设计和仿真研究,取得了较好的效果。
1、风阀控制
1.1、控制目的
双闭环控制系统由位置控制器、速度控制器、步进电动机、减速机、位置传感器、阀门和碟片组成。步进电动机为四相混合式步进电动机,控制器根据位置传感器反馈回来的位置信号进行脉冲控制,保证步进电动机带动碟片按照给定的速度和位置准确无误的转动到位。因此,步进电机的控制至关重要。
1.2、控制原理
风阀控制系统中,步进电机整步步距角为1.8度机械角度,每转200步。一个控制脉冲对应于步进电动机旋转一步。减速机减速比为73:1,即步进电动机转动73步,经过减速机作用后阀门碟片转动1步。转动的速度取决于脉冲频率。利用模糊控制理论,设计有速度控制器和位置控制器的双闭环控制方式。电动风阀控制系统如图2所示。
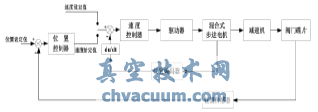
图1 电动风阀控制系统框图
2、控制策略
2.1、模糊PID控制原理
模糊PID控制器是一种在通过演变常规PID调节器的基础上,以偏差E和偏差变化率DE作为其输入,U作为其输出。根据模糊PID控制器专家控制规则,P,I,D加以辅助微调,来满足不同E和DE,使被控对象有良好的动、静态性能。
2.2、模糊控制规则
模糊控制器为二维模糊控制器,输入为位置误差E及位置误差变化率DE,输出为KP、KI、KD的变化量△KP、△KI、△KD。阀门碟片的位置为0度至62度,所以位置误差E的基本论域选择为[-60,60],位置误差变化率DE的基本论域为[-120,120]。E、DE采用相同的语言值划分{NB、NM、NS、ZO、PS、PM、PB},量化论域为[-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6],量化因子3、控制系统的仿真分析
3.1、系统的模型建立
由于步进电动机作控制电机,电动机将按控制指令运动到定位位置θ0,而步进电动机实际位置θ1由于多种原因,与定位位置θ0有微小差距,如果用拉氏变换来表示目标值θ0(s)和控制量θ1(s),则传递函数为:
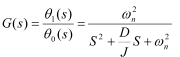
上式中J为电动机转子转动惯量,L1为自感,Zr为转子齿数,iα为A相电流,D为粘滞摩擦系数。为进一步验证本系统的有效性,采用的步进电动机各项参数如表1所示。
表1 步进电动机参数表

把上表数据代入式(1),取iα=1.1A,得到传递函数为(2)式:
3.2、MATLAB的系统仿真
分别进入输入、输出变量的隶属函数编辑器。确定语言变量论域,选择七个语言变量值,给每个语言变量值选择合适的隶属函数。图2为频率为500Hz,位置为90度时,仿真得到的位置曲线。

图2 位置仿真曲线
4、模糊PID控制软件
速度模糊PID控制的软件设计,由位置编码器反馈计算得到速度值,与给定速度比较,计算得到速度误差值E和速度误差变化率DE,然后对E和DE进行模糊化处理,当DE的绝对值小于2时采用PI控制脉冲延时间隔,当DE的绝对值大于等于2时,由模糊控制表得到脉冲时长的增量,计算出所需定时时长,启动发出下一个脉冲的延时等待程序。位置反馈值由位置传感器在中断程序中得到,捕获到位置反馈值后计算位置误差和位置误差变化率并进行模糊化,查表求得PID控制参数KP、KI、KD的增量△KP、△KI、△KD,并计算出KP、KI、KD,完成PID参数的在线校正,进行PID控制,控制器的输出为速度给定。位置控制器计算完毕后立即启动速度控制器。
5、结语
从仿真结果可以看出,采用模糊PID控制方式,风阀控制器的设计达到了系统要求,能够尽快加速到给定速度,超调小。利用该方法进行系统试验,当将要达到给定位置时,速度能很快减速到零,且阀门碟片定位准确。目前该系统已成功应用于远程测控,效果良好。