恒压式气体微流量计的测控系统研制(2)
3.2、变容室内气体温度的测量
由铂电阻温度传感器、热电阻变送模块、模拟量输入/输出接口卡组成温度测量单元。将3个铂电阻分别贴在变容室、参考室和恒温箱表面,并通过导线与热电阻变送模块的IN+、IN-端相连,再将其OUT+、OUT-接到模拟量输入/输出接口卡的模拟输入端。经过16位的A/D后,将温度信号采集到计算机中,这样就实现了变容室温度、参考室温度及环境温度的自动采集。
3.3、变容室内气体体积变化率的测量
变容室采用活塞液压驱动波纹管的结构,在波纹管外侧设计了一个密闭油室,以液压油为体积传递介质,当活塞在油室中运动时,由于油受压后其体积的变化量非常小,所以活塞体积的变化率就等于变容室波纹管体积的变化率。活塞是精密加工的圆柱体,通过测量活塞的运动速度和横截面积就可以计算出变容室的体积变化率。
活塞的运动速度是通过测量活塞的位移△L和所用时间△t而得到的。活塞位移采用光电编码器测量;时间采用计算机内部的时钟进行测量。
活塞在运动过程中,光电编码器可将电机转速(脉冲信号)发送到位置控制卡,并由计算机采集后作为活塞的运动速度参与流量的计算。
活塞位移的信号由光电编码器信号处理转换为数字量后,通过电机控制卡将活塞的位移量送入计算机进行处理,与此同时由计算机内部时钟直接测量时间,根据计算可得到变容室的体积变化率。
3.4、恒压控制
在测量与控制系统中,差压式电容规、IEEE448数据采集卡、工控机和电机控制卡、位置/伺服控制卡、电机、导轨平动机构、活塞、液压油和波纹管共同组成了一个负反馈恒压自动调节的闭环控制系统。
在实际的流量测量过程中不可能保证变容室内压力绝对不变,而只能尽可能减小参考室和变容室之间的差压,同时保持活塞推进速度尽可能稳定,从而保证在测量时间内流量的平均值满足精度的要求。因此,对以上适时控制系统,我们采用了如下两种恒压控制模式实现对流量的测量与控制。
3.4.1、PID控制模式
当测量流量时,将气体充入流量计的变容室中,并达到某一选定的压力值。当关闭变容室与参考室之间的阀门,气体流量从变容室中流出,变容室中的气体压力发生变化,测控系统根据此压力变化采用比例积分微分(PID)算法调节电机转速,使活塞以相应的速度改变变容室的体积,以保持变容室内气体压力恒定。
采用按偏差的比例、积分、微分进行控制,即PID控制模式。它的结构简单,参数易于整定,在长期的应用中已积累了丰富的经验。特别是在流量计控制中,由于被控对象的数学模型难于确定,系统参数经常发生变化,运用控制理论分析综合费用很大,且难以达到预期效果,而采用PID 控制可以根据经验对参数进行在线整定,以便得到满意的控制效果。美国NIST、意大利MIGC的流量计就采用这种恒压控制模式。
本系统采用时间最优(B-B控制)与积分分离PID双模控制算法。时间最优控制可加快调节的作用,而PID控制则保证跟踪精确度与稳态误差满足要求。
时间最优控制模式为
式中:E1—时间最优控制偏差门限;Rk、Yk、ekUk、— 第k次采样时的设定值、检测值、偏差值、计算机输出值;Umax—计算机输出的最大值。 积分分离式PID控制可以增强抗积分饱和功能,防止超调和振荡。其基本思想是:当偏差较大时,取消积分项,只进行PD调节。只有当偏差在某范围内时,再加入积分项,进行PID调节。其控制方程可导出为
式中:
其中ε为预定的门限值。Kp、K1、Kp分别为控制器的比例、积分、微分系数;ε为积分作用门限值,其值需根据控制精度在调试时最后确定。
图3为流量测量过程中的全程差压—位置曲线。从曲线上可以看出,在流量测量过程中,变容室与参考室之间的压力差先要经过一个过程才能逐渐调整到零附近,在这差压调零的起始阶段,差压的值变化较大,即变容室压力不恒定,所以测量的数据无效。处理数据时要根据此全程差压—位移(采样点)曲线选取差压值较小且较平稳的一段区间作为有效测量区间。可以看出,采样点在50~200 之间,差压值是在不到0.01%的范围内波动的,这说明测控系统对变容室内气体的动态恒压控制取得了非常好的效果。
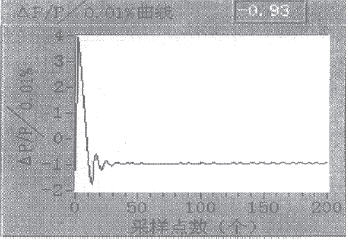
图3 PID恒压控制下的差压—位置(采样点)曲线