罗茨真空泵噪声测量的新型测量方法
声功率测量表面的选择
测量声功率首先要确定合适的测量表面(包络面),测量表面主要由声源的大小、形状、安装状态和发声特点等因素选定。目前常用的测量表面有三种:半球面、球面和矩形六面体。
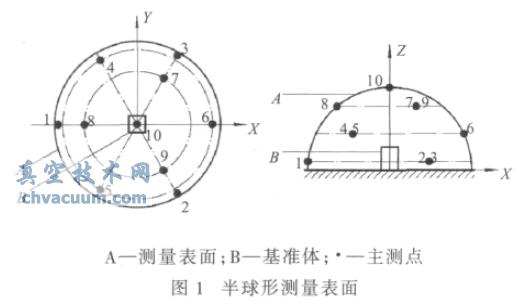
1、半球形测量表面
适用于体积较小或较大而近似立方体的机器。测量表面为半球面,其上一般设10 个主测点,如图1 所示。
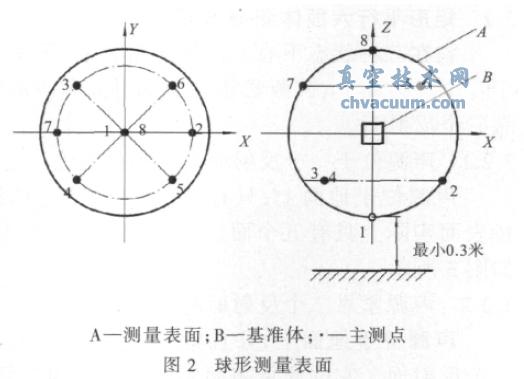
2、球形测量表面
适用于各类悬挂式、手提式电动工具和家用电器。测量表面为球面,其上一般设8 个主测点,如图2 所示。
3、矩形平行六面体测量表面
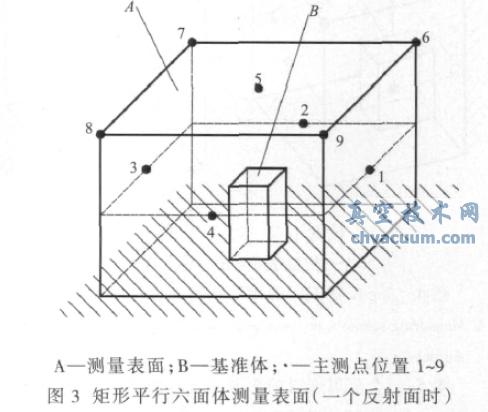
适用于体积较大,形状为矩形的机器。测量表面为矩形平行六面体,其上一般设9 个主测点,如图3 所示。
新型测量表面的考虑
1、新型测量表面的选择
罗茨泵被支架支擎在离地面一定高度的空间,从罗茨泵的安装和运行状态分析,它既可以看作是悬挂式机器,但形状又属于长方形,所以不能简单地采用全球形测量表面或者是矩形平行六面体测量表面,而应采用二者相结合的方法,创建一种新的测量表面。我们认为可以在矩形平行六面体测量表面的基础上,结合悬挂式机器的发声特点,采用一种特殊的测量表面,即全矩形平行六面体测量表面。至于为什么称作全矩形,因为它包含了六面体的全部六个测量表面,而其它的所谓矩形平行六面体测量表面,其测量表面都少于六个。下面对矩形平行六面体测量表面在不同安装条件下的实际测量表面和主测点作以分析。
2、矩形平行六面体测量表面
它在三种状态下有不同的测量表面:声源位于一个反射面上、声源紧靠二个反射面和声源紧靠三个反射面。
2.1、声源位于一个反射面上的测量表面
声源位于地面上,只有一个反射面,它的测量表面实际上只有五个面。因此主测点有9 个,如图3 所示。
2.2、声源紧靠二个反射面的测量表面
声源位于地面上,并且紧靠一面墙,因此有二个反射面。它的测量表面实际上只有四个面,因此主测点只有6 个,如图4 所示。
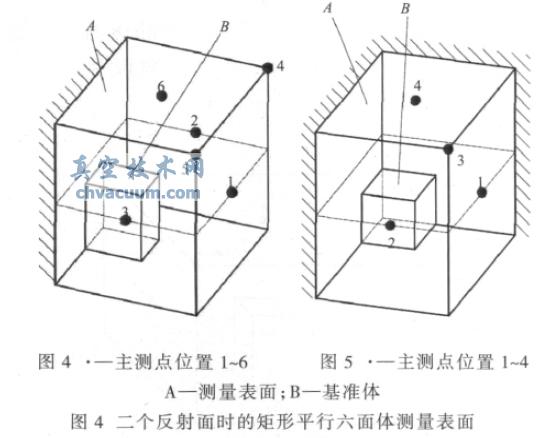
2.3、声源紧靠三个反射面的测量表面
声源位于地面上,并且紧靠互为直角的二面墙,因此有三个反射面。它的测量表面实际上只有三个面,因此主测点只有4 个,如图5 所示。
3、全矩形平行六面体测量表面
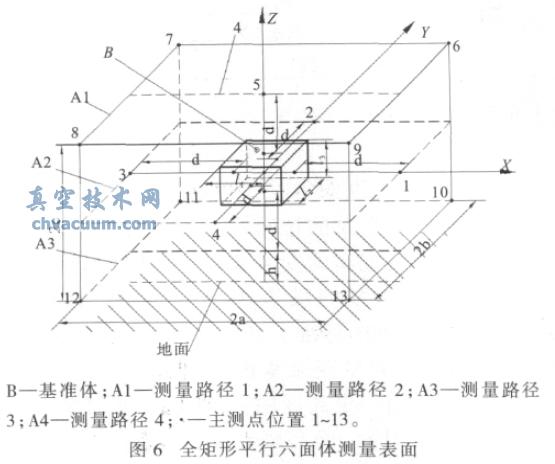
罗茨泵被机架支擎在离地面一定高度的空间,类似于悬挂在空中,所以近距离内没有反射面;但它的形状是矩形,不能采用球形,而应采用矩形平行六面体测量表面。它的测量表面又与众不同,是真正的六面体,有六个测量表面,为了与其它矩形平行六面体测量表面有所区别,我们给它定命为“全矩形平行六面体测量表面”。全矩形平行六面体测量表面是一个创新,国际标准和国外相关先进标准中都没有采用过。它的主测点应该有14 个,考虑到该测量表面的底面中心这一个测点,由于机架的阻挡,测量有一定困难,故予以取消,则主测点应是13 个,如图6 所示。
3.1、测量表面积的计算
S = 8(ab+bc+ca)
式中a = l1/2+d
b = l2/2+d
c = l3/2+d
l1,l2,l3 分别是基准体的长、宽、高。
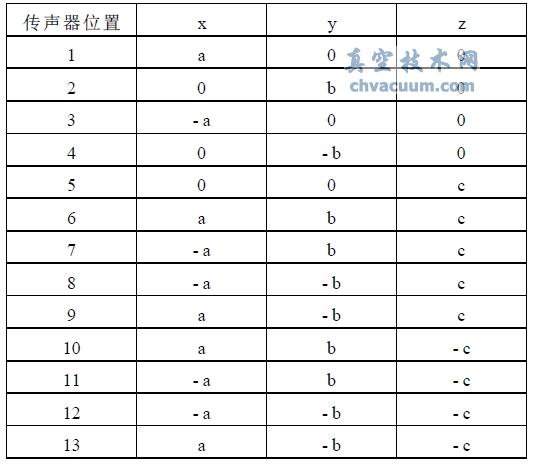
3.2、测点位置
表2 测点位置
全文阅读: