基于贴近算法的电动执行器仿真分析
针对由电机惯性造成的电动执行器不能精确定位的问题,介绍了一种新的电动执行器控制算法--贴近算法,并对基于该算法的电动执行器进行了仿真分析。不同于传统的电动执行器,基于贴近算法的电动执行器不需要任何制动装置就能有效地利用电机的惯性准确定位。详细描述了贴近算法,利用Matlab编程实现了该算法,最后对电动执行器进行仿真试验。仿真结果验证了贴近算法的可行性、有效性及局限性。
1、引言
电动执行器作为工业自动控制系统中的执行元件,要求对系统发出的指令做出快速、准确的反应,以确保系统的正常运行。针对电动执行器,目前主要着重研究的是控制算法、电机的驱动方式和制动方式。随着现场总线广泛应用于工业控制中,基于现场总线的智能执行器也是目前研究的一个方向。
为了解决由于电机的惯性而引起电动执行器惰走的问题,目前常用的方法是采用机械制动或电气制动来克服电机的惯性。虽然抱闸装置或电磁设备能使电机快速停转,但是电动执行器的结构也因此变得异常复杂,同时其精确度也随着制动装置的机械磨损而受到影响。而贴近算法,是基于利用电机惯性使电动执行器准确定位的基本思想。通过对基于贴近算法的电动执行器进行仿真试验,分析得出贴近算法的控制效果取决于电机的转动惯量和贴近算法的参数。在一定的条件下,基于贴近算法的电动执行器能够快速准确地定位。
2、电动执行器的结构
电动执行器主要由控制单元、电机和执行机构组成,其基本原理如图1所示。控制单元根据给定信号与调节机构位移反馈量的偏差产生控制量驱动电机运行,经过变速及传动装置输出角位移或直行程位移,实现对阀门、挡板等调节机构的位置控制。
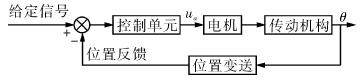
图1 电动执行器原理框图
电动执行器的机理模型可简化为:
式中:θ--电动执行器的角位移输出;ua--控制单元的输出。

式中:J--电机总等效转动惯量;f--电机总等效粘性摩擦系数;CM--阻尼系数;Z1--电机主动齿轮齿数;Z2--电机从动齿轮齿数;M3--电机从动齿轮的负载力矩。
3、贴近算法
基于贴近算法的电动执行器不需要制动装置克服电机的惯性。位置反馈信号与给定信号的偏差为ek=sp–y。当ek达到事先设定的阈值时,电动执行器的电机断电,电机转子在惯性的作用下,带动调节机构达到设定值。
3.1、贴近算法的基本思想
首先为电动执行器的位置反馈值与给定值之间的偏差ek设定两个死区阈值:外死区阈值α和内死区阈值β,如图2所示。
当偏差绝对值大于α时,给电机通正向或反向电压;当偏差的绝对值介于α和β之间时,切断电机电源,电机转子在惯性作用下转动。内死区阈值β与精度相关,当偏差绝对值小于β时,可认为电动执行器已经达到了精度要求。控制算法的输出量uk的取值为0、1、-1,分别表示电机断电、施加正向电压、施加反向电压。
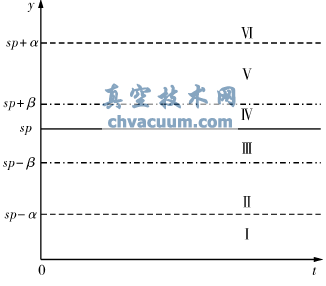
图2 外死区阈值α和内死区阈值β
3.2、贴近算法的具体描述
(1)当ek≥α时,执行器输出y进入区域I,即调节机构的位置还没达到设定的外死区阈值。则电机应该正转,需要给电机施加正向电压,即贴近算法的输出uk=1。
(2)当β≤ek<α时,执行器输出y进入区域II,即内、外死区之间。对此分两种情况讨论:
①果上一采样周期的控制算法输出uk-1=1且偏差ek-1≥α,执行器输出y在前一个的采样周期刚从区域I进入区域II,此时应切断电机的电源,即uk=0,使转子在惯性的作用下继续转动。但是如果uk-1=1且β≤ek-1<α,说明执行器输出y在上一采样周期之前就已经进入了区域II,但在惯性作用下仍然没有到达内死区,因此需要继续给电机施加正向电压,uk=1。
②另一种情况是,如果上一采样周期的输出uk-1=0,说明在上一个采样周期中,转子已经在惯性作用下转动了。在这种情况下就应判断电机转子是否已经停止。若ek≠ek-1,说明电机转子还没停止转动,所以算法的输出uk=0,让电机继续在惯性作用下转动。如果ek=ek-1,说明电机转子已经停止,那么继续给电机施加正向电压,即uk=1;
(3)当0≤ek<β时,执行器输出y在区域III,达到精度要求,应切断电机电源,即uk=0。
(4)当ek<-α时,执行器输出y在区域VI,电机应该反转,使y减小,所以应给电机施加反向电压,即uk=-1。
(5)当-α≤ek<-β时,这与β≤ek<α的情况类似,考虑两种情况:
①当uk-1=-1且偏差为ek-1≤-α时,执行器输出y刚从区域。进入区域。,应使电机断电,即uk=0,使转子利用惯性转动。如果uk-1=-1且-α≤ek-1<-β,说明执行器输出y在惯性作用下还没到达内死区内,此时电机应该反转,即uk=-1。
②当uk-1=0时,说明在上一个采样周期中电机已经断电,在这种情况下就应判断电机转子在惯性作用下的转动是否已经停止。若ek≠ek-1,说明电机转子还没停止,应使电机继续在惯性作用下转动,所以算法的输出uk=0。如果ek=ek-1,说明电机转子已经停止,但执行器输出y还没到达内死区,那么需要再给电机加反向电压,即uk=-1。
(6)当-β≤ek≤0,执行器输出y在区域。,执行器输出y已达到精度要求,使电机断电,uk=0。
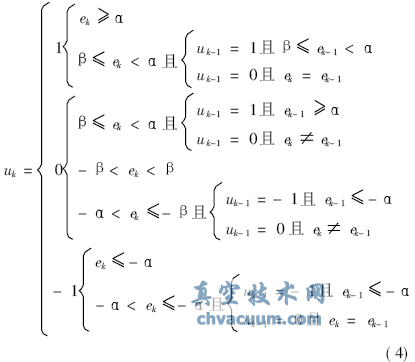
3.3、贴近算法的数学描述
将上述对贴近算法的文字描述表示为如式(4)所示的数学表达式:
4、仿真实例
根据表达式(4),利用Matlab编程实现贴近算法,并分别在单位阶跃和正弦输入下对电动执行器进行仿真。
4.1、电动执行器的单位阶跃响应
根据式(2)和式(3)可知,k和τ的值与电机的转动惯量J成反比。因此选取两组k和τ的值,在单位阶跃输入下对电动执行器进行仿真。两组k和τ的值分别为:k=0.012,τ=0.5;k=0.0012,τ=0.05。贴近算法中的参数:外死区阈值和内死区阈值设为α=0.005,β=0.003。电动执行器单位阶跃响应曲线如图3所示。
图3说明当电机惯量大小合适时,采用贴近算法的电动执行器能快速、准确地定位。但是当电机的转动惯量增大时,电动执行器单位阶跃响应的超调量增加,调节时间变长。若电机转动惯量太大,电动执行器会发生振荡。这是因为电机惯性太大,使电机转子在惯性的作用下转角太大,当内、外死区阈值之差很小时,偏差的绝对值∣ek∣总是大于外死区阈值A,致使电动执行器不能在电机惯性的作用下达到设定值。

图3 不同转动惯量的电动执行器单位阶跃响应
鉴于转动惯量太大的问题,通过改变外死区阈值α,对电机参数为k=0.0012,τ=0.05的电动执行器进行仿真,得到外死区阈值α=0.005和α=0.03时电动执行器的单位阶跃响应曲线如图4所示。
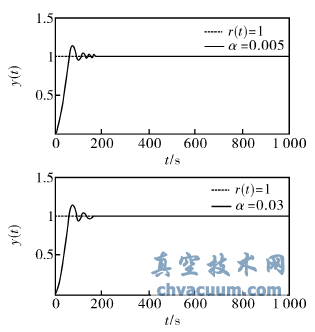
图4 选取不同外死区阈值的电动执行器单位阶跃响应
由图4可知,当外死区α从0.005增加到0.03后,电动执行器调节时间变短,收敛速度加快,但是超调量没有减小。
4.2、电动执行器的正弦响应
为了验证基于贴近算法的电动执行器对时变输入的响应,在正弦输入下对电动执行器进行仿真。
选取三组电机参数:k=0.012,τ=0.5;k=0.0012,τ=0.05;k=0.00012,τ=0.005。贴近算法中的参数:外死区阈值和内死区阈值设为α=0.005,β=0.003。电动执行器的正弦响应曲线如图5所示。
由图5可知,在电机转动惯量较小时,基于贴近算法的电动执行器能迅速准确地定位,跟踪时变输入信号。但当电机的转动惯量过大时,电动执行器在惯性的作用下偏离设定值,使偏差过大,超过外死区阈值,从而电动执行器不能利用电机的惯性准确地定位。
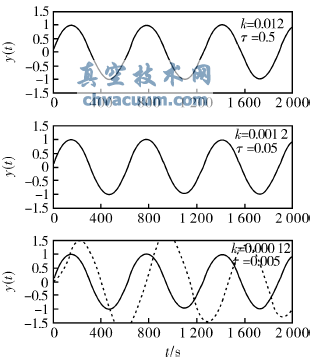
图5 不同转动惯量的电动执行器正弦响应
改变外死区阈值α对电动执行器进行仿真,得到外死区阈值分别α=0.005和α=0.03时电动执行器的正弦响应曲线如图6所示。
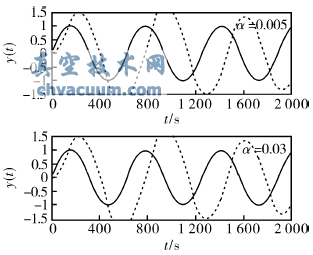
图6 改变外死区设定值时电动执行器的正弦响应
由图6可知,改变外死区阈值对仿真结果的影响不明显,说明贴近算法对于时变的输入信号的跟踪能力主要取决于电机的转动惯量。
5、结论
针对电动执行器制动装置对电动执行器结构和性能的影响,为了简化电动执行器的结构,同时提高其定位的准确性,研究了贴近算法在电动执行器中的应用。采用该算法的电动执行器不需要制动装置。通过对偏差设置内死区阈值和外死区阈值,使电动执行器在电机惯性的微调作用下准确定位。通过仿真试验得出结论:如果选择合适的电机转动惯量和外死区阈值,基于贴近算法的电动执行器能实现准确快速地定位。但是,对于时变的输入信号,在电机转动惯量太大的情况下,即使调整外死区阈值的大小,仍然无法使电动执行器准确定位。因此,如何改善基于贴近算法的电动执行器对时变输入的跟踪性能将是下一步的研究方向。