基于SolidWorks和ANSYS Workbench的六自由度焊接机器人的建模与优化设计
运用SolidWorks 软件设计出六自由度焊接机器人系统的虚拟样机,建立机器人静力学平衡方程,分析了机器人的静态应力,继而通过ANSYS Workbench 对机器人关键部位进行有限元分析,最终给出了机器人优化设计方案。
引言
机器人技术毫无疑问是未来的战略性高技术,充满机遇和挑战。工业机器人是机器人技术的重要分支,在各种机器人中,工业机器人应用较早,发展最为成熟。同时,工业机器人技术的不断进步一直牵引着机器人学科的发展,使机器人的应用领域从工业扩展到军用、空间、水下、医疗、服务等各个领域。焊接是制造业中最重要的工艺技术之一。它在机械制造、核工业、航空航天、公共交通、石油化工及建筑和电子等行业中的应用越来越广泛。随着电子技术、计算机技术、数控及机器人技术的发展为焊接过程自动化提供了十分有利的技术基础。近20 年来,在半自动焊、专机设备以及自动焊接技术等方面取得了许多研和应用成果,表明焊接过程自动化己成为焊接技术增长点之一。从21 世纪先进制造技术的发展要求来看,焊接自动化生产已成为制造业生产发展的趋势。
1、焊接机器人的现状
焊接机器人是从事焊接的工业机器人。根据国际标准化组织( ISO) 工业机器人术语标准的定义: / 工业机器人是一种多用途的、可重复编程的自动控制操作机,具有3 个或更多可编程的轴,用于工业自动化领域。0,为了适应不同的用途,机器人最后一个轴的机械接口通常是一个连接法兰,可接装不同工具或称末端执行器。焊接机器人就是在工业机器人末轴的法兰装接焊钳或焊( 割) 枪的,使之能进行焊接,切割或热喷涂。焊接机器人是机器人家族中的主力军,能在恶劣的环境下连续工作并能提供稳定的焊接质量,不但提高了工作效率而且减轻了工人的劳动强度,降低了生产成本和对工人操作技术的要求。
我国的焊接机器人学术研究和应用推广工作开展大约有20 多年的历史,同其他行业引进先进技术的过程一样,我国的焊接机器人走过了一条从引进、消化到自行研制的过程,目前我国在焊接机器人研究和应用方面虽然具有一定的规模,在某些方面甚至达到了国际先进水平,但仍然存在明显不足。
目前国内外焊接机器人的技术研究现状主要在以下3 个方面:
(1) 协调多台焊接机器人和外围设备的控制。这里的焊接机器人指的是焊接机器人系统或工作站,通常包括机器人本体、机器人控制柜、焊机送丝装置、变位机和夹具等部件。
( 2) 研究焊缝跟踪技术。由于焊接环境等因素的不同,实际焊接时的轨迹频繁变动。
(3) 仿真技术。机器人在研制、设计和试验过程中,经常需要对其运动学、动力学性能进行分析以及进行轨迹规划设计,而机器人又是多自由度、多连杆空间机构,其运动学和动力学问题十分复杂,计算难度和计算量都很大。若将机器人作为仿真对象运用计算机图形技术、CAD 技术和机器人学理论在计算机中形成几何图形,并动画显示,然后对机器人的机构设计、运动学正反解分析、操作臂控制以及实际工作环境中的障碍避让和碰撞干涉等诸多问题进行模拟仿真,这样就可以很好地解决研发机器人过程中出现的问题。
2、机器人总体结构设计
我们的研究对象是六自由度焊接机器人,机器人由6 个连杆和6 个转动关节组成。所有零件造型和整机组装,是在三维造型软件SolidWorks 中完成的。机器人结构整体图如图1 所示,整机包括基座、大臂、肩部、肘部、小臂和手腕六大组件。机器人主体的回转( 关节1) 是由基座内部安装的电机驱动,驱动电机安装在大臂与基座的关节连接处,驱动大臂作上下俯仰( 关节2) 。机器人的肘连接机器人的大臂与小臂,并由安装在其内部的电器驱动小臂作上下俯仰( 关节3) ,腕部扭转( 关节4) 电机直接安装在肘部中,以节省空间。腕部俯仰( 关节5) 和腕部回转( 关节6) 的驱动电机均安装在小臂的内部,通过传动齿轮、带轮驱动将动力传递给腕部。
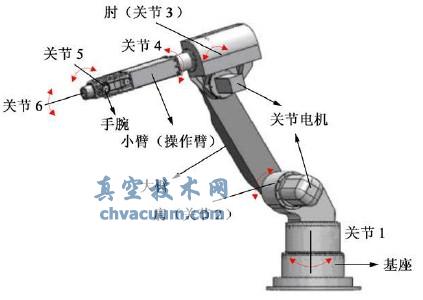
图1 焊接机器人的机械结构与自由度示意图
5、结束语
通过在CAD 软件SolidWorks 中对焊接工业机器人的虚拟设计,并在ANSYS Workbench 对机器人的关键部位( 大臂) 进行有限元分析,直观地展现了大臂的应力与位移分布,发现在初步设计时出现的不足,分析结果并提供优化设计的方案,优化前后参数对比见表1。
表1 优化前后参数对比

由机器人大臂优化后的综合形变可知,大臂的综合形变量最大值为0.1297 mm,向的形变量为0.0558mm,通过查询机械手册知45# 钢的屈服极限是355MPa,抗拉强度是610MPa,符合设计要求。对比可知,优化后的仿真结果明显要优于优化之前。






