基于SolidWorks的装载机工作装置设计及仿真
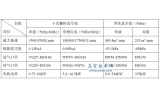
根据相关设计规范,利用AutoCAD 软件确定装载机工作装置各杆件长度及各杆件铰接点位置,运用SolidWorks 软件建立工作装置的三维模型,并将模型映射到Cosmos motion 插件中进行运动和动力学仿真研究,通过对仿真曲线的分析,可得知所设计装载机工作装置的性能响应情况。该设计方法将提高装载机的设计效率和质量。
1、装载机工作装置的设计要求
装载机工作装置的设计要求满足如下性能:
(1)铲斗举升平动性能
铲斗举升平动性能是指铲斗装满物料在动臂的举升过程中,为了避免物料散落,要求连杆机构使铲斗接近平动。在设计中要求铲斗相对于水平面转动角度≤10°。
(2)铲斗自动放平性能
铲斗自动放平性能是指铲斗在最高位置卸载后,铲斗由最高位置下放到地面时,铲斗斗底要求与地面重合。
(3)高位卸载角度的要求
高位卸载角度的要求是指铲斗在最高位置卸载时,为了使物料正常卸载,铲斗斗底与水平面的夹角应≥45°。
除了以上性能外,由于工作装置是由杆件构成的连杆机构,为了防止杆件在运动过程中出现死点和自锁现象,各传动构件之间传动角应≥10°。2 各杆件长度及铰接点位置的确定
装载机的工作装置主要由铲斗、动臂、摇臂、连杆以及转斗油缸和动臂油缸等组成。工作装置作业过程中有4 种工况:插入工况Ⅰ、铲装工况Ⅱ、最高位置工况Ⅲ和高位卸载工况Ⅳ。根据装载机的工作及相关设计规定要求,确定最大卸载高度、最小卸载距离和高位卸载角等。并采用AutoCAD 确定各杆件的长度及各杆件的铰接点位置(见图1),具体步骤为:
(1)以铲斗斗尖为坐标原点, 确立XOY 坐标系,并绘制铲斗二维图形;
(2)确定动臂与机架的铰接点A,G 点是工作装置在低位工况(即工况Ⅰ和工况Ⅱ)时动臂和铲斗的铰接点,G′点是工作装置在高位工况(即工况Ⅲ和Ⅳ)时动臂和铲斗的铰接点。G 和G′点同在以A点为圆心,动臂AG 长为半径的圆弧上,所以A 点必在GG′的垂直平分线上。A 点的高度越低,整机工作的稳定性越好;
(3)连杆与铲斗和摇臂的2 个铰接点F、E 的确定。要求连杆与摇臂的铰接点E 在收斗状态时不能与前桥相碰,且传动角不能<10°。当传动角取20°,最小离地高度取350 mm 时,由作图知,1 270 mm<BE<1 300 mm,BE=1 280 mm。
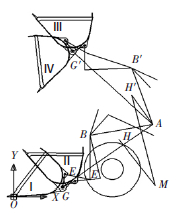
图1 装载机工作装置的4 个工作位置
Ⅰ. 插入工况Ⅱ. 铲装工况Ⅲ. 最高位置工况Ⅳ. 高位卸载工况
5、结语
通过对装载机工作装置各杆件的尺寸确定和三维建模以及运动学和动力学仿真分析,输出了装载机工作装置的运动位移和受力曲线,可以有效地分析装载机工作装置的性能响应情况,同时为其他类机械设计提供了技术借鉴。利用SolidWorks 软件进行产品的设计与仿真, 对现代企业节约成本、加快产品投放市场速度具有重要的意义。