一种双螺杆真空泵转子的接触线及动平衡特性研究
对一种双螺杆真空泵普遍使用的,由长幅外摆线和渐开线组成的端面型线转子进行了研究,推导出转子接触线方程的一般求法,同时给出利用MATLAB 表现空间接触线的新式方法;分析各段接触线的组成,给出了所生成接触线的形状、长度的计算以及一个齿间容积内不同转角位置时接触线的长度变化规律。其次,根据简化转子力学模型研究了转子的动平衡特性, 提出了两种动平衡设计方案。文章为其它双螺杆泵转子的接触线和动平衡特性研究提供了理论依据及参考方法。
近年来,干式螺杆真空泵以其结构简单紧凑、能耗低、寿命长、抽气腔元件无摩擦、无油污染等优越性能,而逐渐成为市场需求量很大的真空获得设备。干式螺杆真空泵研发的最关键技术之一,就是螺杆转子及其型线研究。转子螺旋齿面实质上也就是这些闭合曲线沿螺旋线扫描而形成的螺旋面,伴随着转子型线设计的不同,也就有了各种类型的螺杆泵。对于螺杆泵转子型线的要求,主要是要在齿间容积之间有优越的密封性能,因为这些齿间容积是实现气体压缩和排气的工作腔。在双螺杆泵的各种泄漏损失中,真空技术网(http://www.chvacuum.com/)认为通过接触线的泄漏损失占了所有泄漏损失的绝大部分。
同时螺杆转子啮合时,接触线的形状和长度在很大程度上决定了螺杆真空泵的抽气性能,所以在转子型线设计中,除了设计转子型线的各构成曲线外,还要准确的计算转子型线的空间瞬时接触线。目前,国内外学者在设计转子型线时,多偏向于设计转子型线的构成,而对接触线的计算则很少,未给予足够的重视。本文对一种常用的由长幅外摆线、渐开线及两段圆弧组成的端面型线,计算了转子的接触线;其结论和方法适用于其它任何类型螺杆泵接触线的计算,具有普遍的参考价值。
其次,作为螺杆转子设计的技术诀窍之一,转子动平衡的设计方法一直缺少公开发表的相关文献。针对目前螺杆真空泵中常用的单头等螺距螺杆转子,根据简化转子力学模型研究了转子的动平衡特性,给出了其能达到完全动平衡的处理方案。
1、转子模型及空间坐标系建立
设定转子端面型线及螺杆转子参数:齿顶圆Rt=90mm,齿根圆Rr=30mm,渐开线基圆r=Rr,节圆(啮合圆)r1=60mm,螺杆转子导程p=95mm,转子取4.5 个导程长。
转子端面型线及其三维模型如图1 所示;其中渐开线cd 是由标准渐开线GE,通过旋转其与节圆交点F 至啮合点H 处得到;为保证接触线连续在cd 间加入了与另一转子d 点同一位置相啮合的长幅外摆线cc1。
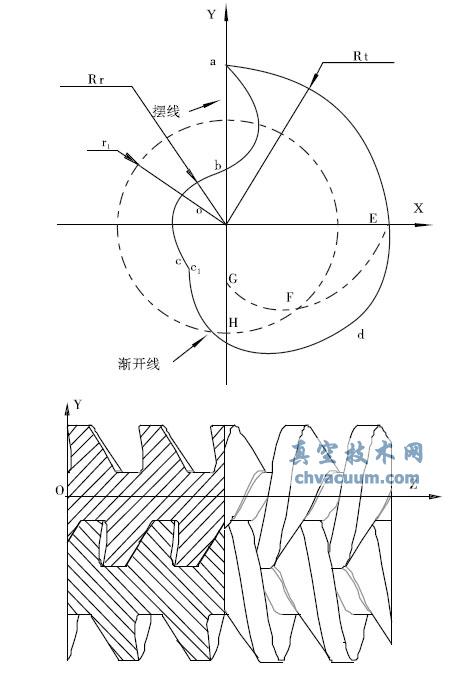
图1 端面型线及其转子模型
4、结论
研究了一种双螺杆真空泵转子的接触线及动平衡的特性,其结论和方法适用于其它任何类型螺杆转子的计算,具有普遍的参考价值,具体研究成果有:
(1) 推导出可应用于实际计算的接触线方程,其它线型也可用这种一般方法来推导其转子的接触线方程。
(2)利用MATLAB 实现空间螺旋面相交的方法,求取相近点,描述出了螺杆转子的接触线,此方法直观便捷,且不易出错。
(3)设计了一种生成接触线形状和计算接触线长度的方法,此方法虽然是近似求解,但只要取的点数足够多,就可达到很高的精度,满足实际需要。
(4)通过简化转子的受力模型,分析求解转子等效在两端面上的质径积,简单求解就能得出螺旋转子的两种动平衡方案。






