爪形转子干式机械真空泵工作原理
爪形转子干式机械真空泵 ( 以下简称爪式泵 ) 在泵壳内具有两个共轭啮合的爪形转子。与罗茨真空泵类似,转子由一对同步高精度齿轮来带动旋转并固定相位。转子型线由六段摆线和圆弧组成,转子之间及转子与泵壳之间并不接触,留有微小的间隙。气体的进气口和排气口均设在泵壳的端面上,分别由两个转子端面周期性的定时开闭,具有阀的调节作用。
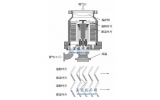
图26:爪式泵的工作原理图
从爪式泵的工作原理看,它属于旋转式容积真空泵。图 26 表示爪式泵的抽气工作过程。由图可见,泵腔被爪型转子分隔成吸气腔和排气腔两部分。
图 26(a) 是泵在吸气和排气的过程,泵吸气腔随着转子的旋转,容积逐渐增大,吸入气体;而排气腔容积则逐渐减小,对气体进行压缩,从而排出气体。
图 26(b) 是泵转子刚好位于吸气和排气终止位置,吸气口和排气口被转子的侧壁封住。此时吸气腔的容积最大为 Vs ,在两个转子之间还封存了部分未被排出的处于排气压力状态的气体,其容积为 Vc ,这部分气体经过两次膨胀后将被带回到吸气腔中。
图 26(c) 是转子正好处于换向的瞬间,转子从该位置再转过一微小角度,则转子间封存的部分气体将膨胀到环形空间去,这便是转子封存携带的气体的第一次膨胀过程。通过这次膨胀,转子间封存气体的压力降低,而环形空间内的压力则由于封存携带气体的进入而升高,从而增加泵的压缩比和节省泵的压缩功率。
图 26(d) 是转子将要进行下一次吸气时的位置。这时转子间封闭被带回去的剩余气体将和吸气口相通,这部分气体经过第一次膨胀后,压力已经降低了。随着转子的继续转动,吸气腔容积的增大,这部分气体将进行第二次膨胀。转子从图 (d) 位置继续转动,吸气腔容积逐渐增大,进行吸气。排气腔容积逐渐减小,由于排气口尚未打开,因此气体被压缩,压缩量随排气口上限位置的变化而变化,这种压缩过程是罗茨真空泵所不具备的,所以爪式泵的压缩比要远高于罗茨真空泵。当排气口与排气腔中的压缩气体接通时,被压缩气体或排到级间通道从而进入到下一级,或冲开排气阀,排到大气中去。随着泵转子的连续旋转,以上吸气和排气过程循环进行,实现了泵的连续抽气目的。泵转子每转一周,吸气和排气各进行一次。
通过以上分析可知,爪式真空泵同时具有罗茨真空泵和旋片真空泵的优点。
与无油干式机械真空泵相关的其它主题: