基于Pro/E和ADAMS的牛头刨床导杆机构仿真分析
阐述了牛头刨床导杆机构在Pro /E 环境中建模和ADAMS 环境中运动仿真过程。通过对机构中滑枕的速度和加速度曲线分析,说明了滑枕在工作阶段运行平稳,返回阶段速度较快。分析了导杆的摆角曲线,计算了机构的行程速比系数,说明了机构存在急回特性。另外分析了驱动的平衡力矩和功率曲线,结果表明,由于返回阶段速度较快,所需的驱动力矩及功率的损耗相应增加,运动参数符合刨床的工作特点,机构设计合理。
近年来,虚拟样机技术在国内外得到了快速发展,通过建立虚拟样机,能够模拟产品在真实环境下的各种运动学和动力学特性,并根据仿真结果优化产品的设计方案,避免了传统设计中物理样机的反复制造、修改过程,大大缩短了开发周期,降低了研发成本,提高了面向客户与市场需求的能力。
利用虚拟样机进行仿真设计,所涉及的领域比较广,可以支持以保证和提高产品性能为主旨的各种工程分析,支持不同领域的人员同时对同一个虚拟样机进行测试、分析,从而将许多潜在的产品设计隐患和缺陷消灭在设计初期阶段,因而可以大幅度提高产品的质量。
本文采用Pro/E 对某牛头刨床导杆机构进行了三维CAD建模,并导入到虚拟样机分析软件ADAMS中,进行运动学仿真分析。
1、基于Pro/E 的CAD 建模
ADAMS 本身具有一定的三维CAD 建模能力,但对于牛头刨床导杆机构这样具有复杂外形与构造的机械来说,则建模能力有限且过程比较复杂,因此需要由Pro /E 的专业CAD 软件协助建模。对于导杆机构虚拟样机的CAD 建模,主要是利用Pro /E 中的拉伸、旋转、扫描等操作建立零部件三维实体模型,力求形状圆滑美观逼真。同时考虑到仿真研究的需要,对不是特别重要的图形,则尽量简化,如取消过渡圆角等非关键性信息,完成了滑枕、滑块、导杆及齿轮等各零件的建模。
机构传动过程由斜齿轮转动带动摇杆作往复摆动,导杆带动滑枕作往复直线运动。装配完成的虚拟样机应该有一个自由度,所以在装配时应根据运动形式选择“连接”约束方式,如销钉、圆柱、球、滑动杆等。本次装配采用了2 个转动副、1 个移动副和1 个圆柱副,具体装配方法为: 滑枕和摇杆、方滑块和斜齿轮之间的相对运动副为转动副,可以选择销钉( pin) 连接约束方式; 方滑块和摇杆之间的相对运动副为移动副,可以选择滑动杆( slider)连接约束方式; 圆滑块和摇杆之间的相对运动副为圆柱副,可以选择圆柱( cylinder) 连接约束方式; 其他辅助零件采用刚性连接中的“匹配”和“对齐”约束。这样就成功装配完成了导杆机构的CAD模型,如图1 所示。
利用Pro /E 干涉分析功能进行干涉检查,避免了该模型导入ADAMS后因机构出现问题而必须返回Pro /E 环境重新修改的重复工作。
2、建立虚拟样机
由于Pro /E 与ADAMS 是分属2 家不同公司开发的软件平台,从功能以及程序内核等多方面来看,各自的数据都很难为对方识别。要将Pro /E格式的三维实体模型导入ADAMS 环境中,必须利用Pro /E 和ADAMS 的接口软件Mechanism/Pro2005,采用无缝连接的方式,用户不必退出Pro /E 应用环境,即可将导杆机构装配体中的零件定义为刚体,添加一些简单的约束后,将模型导入到ADAMS 环境中。重新定义各零件的材料属性等,软件会自动计算质心、转动惯量等质量信息,此外还要进行如下模型完善工作:
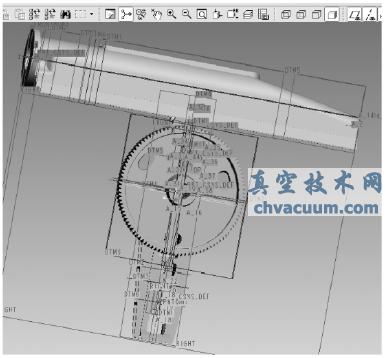
图1 导杆机构的CAD 模型
a. 为保证机构运动的准确,取消原先设定的约束。
b. 依据机构运动关系,在构件之间重新添加约束,原动件添加驱动。
c. 使用模型验证工具检查错误,包括不恰当的连接和约束、没有约束的构件、样机的自由度等内容。
通过上述操作对模型进行进一步的完善,建立了导杆机构的虚拟样机模型( 如图2 所示) 。

图2 导杆机构虚拟样机模型
4、结束语
本文通过对导杆机构中滑枕的运动曲线分析,说明了在工作阶段滑枕的速度值变化平缓,加速度较小,所需的驱动力矩和功率损耗基本恒定。而返回阶段则相反,速度变化剧烈且所需驱动力矩和功率损耗大幅增加。根据所测量导杆摆角的最大值,可计算出机构的行程速比系数大于1,证明机构存在急回特性,机构仿真的结果与牛头刨床的切削特点相符合,本次设计具有较好的可靠性利用虚拟样机技术对机构的运动进行仿真并分析相关参数,无需制造物理样机即可验证产品设计的正确性,从而大大缩短了设计周期。另外,还可根据不同的工作要求进一步对机构进行改进设计,推进同类产品的模块化和系列化。