基于Pro/E的机构三维建模与运动仿真实例分析
介绍了机构的Pro/E三维建模方法及运动仿真技术;结合实例完成了几种机构的三维建模和运动仿真;通过仿真分析可以直观地了解机构中各零件的运动关系,还可以通过进行各种测量来研究机构的运动特性,以便及时修改和完善设计。
引言
随着科学技术的飞速发展,CAD/CAM/CAE技术应用越来越广泛。在CAD设计软件中,Pro/E是一款功能强大的并深受广大技术工作者欢迎的三维软件,它在机械设计的各个领域应用十分广泛。本文介绍机构的Pro/E三维建模方法以及运动仿真技术,并结合实例完成机构的三维建模和运动仿真。
1、零件的参数化建模
参数化设计是Pro/E重要的设计理念,所谓参数化设计是将模型中的定量信息变量化,使之成为可以任意调整的参数。对于变量化参数赋予不同的数值,就可以得到不同大小和形状的零件模型。其中,参数化模型的建立是关键。参数化设计可以大大提高模型生成和修改速度,在产品系列设计、相似设计等具有较大的应用价值。比如:Pro/E的二维草绘实质是参数化的,在草绘环境下,只需要绘制出大致的二维几何形状,不必是精确的尺寸值,然后再修改尺寸值,系统会自动以正确的尺寸值来修正几何形状。除此之外,Pro/E对二维草图上的某些几何图形会自动假设某些相关性,如:对称、对齐、相切等限制条件,以减少尺寸标注的困难,并达到全约束的草图外形。
参数是参数化设计的重要概念,在三维模型中,参数是通过“尺寸”的形式来体现的,变更参数可以很方便地修改设计意图。在零件模式下,单击“工具”菜单,打开参数对话框即可对参数进行添加或编辑。其中,关系式是参数化设计的另一个重要概念,它体现了参数之间互相约束的关系。
2、机构的装配
在对机构进行装配时,首先分析机构的整体结构和各零件的功能,了解零件对于整个机构而言是活动件还是固定件。若是活动件,多采用连接的方式进行装配;若是固定件,则定义几个约束关系完成组合。
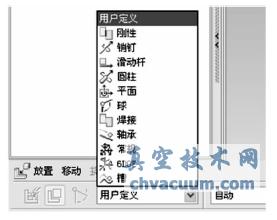
图1 预定义集列表框
2.1、连接的类型
当向一个装配体中添加元件时,系统会弹出元件放置操控板。如图1所示,在元件放置操控板的“预定义集”列表框中列出了几种连接类型:刚性、销钉、滑动杆、圆柱、平面、球、焊接、常规等。从“预定义集”列表框中选择连接类型后,进入“放置”上滑面板,定义相应的约束,将元件“连接”到装配体中。
这些连接类型中,销钉连接是最常用的类型,连接元件可以绕着附着元件转动,不能相对于附着元件移动,销钉连接提供一个旋转自由度,没有平移自由度。圆柱连接与销钉连接的区别是连接元件既可以绕着轴线相对于附着元件转动,也可以沿着轴线相对于附着元件平移,它提供一个旋转自由度和一个平移自由度。滑动杆连接中,连接只能沿着轴线相对于附着元件移动,只能提供一个平移自由度,没有旋转自由度。平面连接提供两个平移自由度和一个旋转自由度,使连接元件既可以在一个平面内相对于附着元件移动,也可以绕着垂直于该平面的轴线相对于附着元件转动。球连接提供三个旋转自由度,没有移动自由度。轴承连接是球连接和滑动杆连接的组合,连接元件既可以在约束点上沿任意方向相对于附着元件旋转,也可以沿着对齐的轴线移动,提供一个平移自由度和三个旋转自由度。而刚性连接使连接元件与附着元件之间没有任何相对运动,它们会共同构成一个主体。
2.2、骨架模型的建立
在大型的装配设计中,会由于零部件过多造成彼此间的约束条件相冲突,装配会出现困难。Pro/E中提供了一个骨架模型的功能,使设计者在装配前先设计好零件在空间的静态位置。建立好骨架模型相当于给机构建立了产品装配的基本框架,可以将相应的元件装配到骨架模型上,从而构成完整的组件或者机构。骨架模型主要由一些基准点、基准轴、基准坐标系、基准曲线和曲面组成。
在机构的三维建模中,往往不是一个完整的装配体,骨架模型在其中的作用主要就是确定好元件的空间位置,这样就不需要设计一些与机构运动关系不大的机座零件。
5、结束语
本文介绍了Pro/E的参数化三维建模和运动仿真技术,并应用这些技术对常用机构进行三维建模和运动仿真分析。通过运动仿真分析一方面可以直观地了解机构中各零件的运动关系;另一方面还可以通过测量进一步研究机构的运动特性,发现设计的不足以便及时改进,能减少实际产品生产时出现的问题,大幅度缩短产品开发周期,减少产品开发的成本,提高市场竞争力。






