CATIA运动仿真的研究与应用
利用CATIA运动仿真模块(DMU Kinematics)可对已装配好的三维数模进行准确的运动仿真。用户可依照运动学原理,通过该模块提供的各种接头(Joint)创建约束自由度建立运动机构,并且分析机构的运动状态与运动轨迹。通过测试飞机舵面运动角度的实例,说明该模块在测试传感器量程选择、测试传感器安装支架设计等方面的应用。最后,利用运动仿真验证整个测试过程的合理性。
1、引言
由于飞机在地面模拟试验中需要测试的对象类型很多,所测的物理量也不尽相同,包括位移、角度、温度、力等参数。因此,测试所需的传感器类型也很多,例如:角位移传感器(RVDT)、线位移传感器(LVDT)、拉绳传感器等。数采系统采集数据的优劣不仅与传感器本身的性能、精度等指标有关,还与安装传感器的支架有密切的关系。由于传感器的类型不同,所以需要设计各种符合它们测试和安装要求的支架。飞机试验台架本身比较庞大和复杂,且又安装了飞控、液压等系统,导致设计部分传感器安装支架时存在安装空间狭小以及支架本身需满足复杂机械运动要求等问题。利用CATIA 软件来设计这些安装支架,并将装配好的数模利用该软件的运动仿真模块按系统运动原理进行全行程的仿真,不仅可以验证安装支架的设计是否合理,还可验证传感器行程选择是否满足测试要求。
2、总体思路
一般来说,利用CATIA 软件设计测试传感器安装支架分为以下几步:
1) 首先,根据测试要求以及飞机系统件、结构件在试验台上的运动关系,同时结合传感器自身的结构特点设计合理的安装支架。
2) 其次,将设计好的安装支架按测试要求装配到被测位置上,并检查其与飞机系统件、结构件是否发生干涉现象(即结构上相碰)。
3) 最后,将传感器的三维数模也同时装配到所设计的安装支架上,并利用CATIA 软件的运动仿真模块按照系统的运动原理进行三维数模的运动仿真,并在该过程中检查是否有数模发生干涉现象,同时检查传感器量程是否满足测试对象的要求。
3、CATIA 运动仿真模块的应用
3.1、CATIA 软件运动仿真模块功能简介
随着计算机辅助技术CAD/CAE/CAM 的日益发展和成熟,其应用范围也越来越广。由法国达索公司(Dassault System)推出的CATIA 高级计算机辅助设计、制造和分析软件,广泛应用于航空航天、汽车、造船和电子设备等行业。它作为一个CAD/CAE/CAM 一体化的集成软件,除了强大的三维实体造型功能外,还能够直观、准确反映零件、组件(构件)的形状、虚拟装配关系。其运动仿真模块根据机械运动原理提供了各种接头(Joint),可对装配好组件的实际运动情形与整机装配顺序和过程在计算机上进行仿真模拟。在整个仿真过程中还可进行结构、干涉和碰撞分析,并验证整个运动过程中各接头(Joint)设置的正确性和合理性。
3.2、运动机构的分析
我们以设计测试副翼角度的线位移传感器(LVDT)安装支架为例,说明CATIA 软件运动仿真模块的实际应用。在飞机地面模拟试验中,飞机各活动面的运动角度是非常重要的参数值,一般是通过在舵面加装线位移传感器(LVDT)来测得其角度,典型的测试方案如图1 所示:
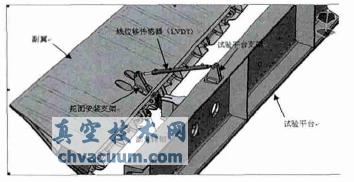
图1 副翼角度测试方案
由图1 可知,当副翼沿着转轴转动时,带动舵面上的安装支架一起运动,从而导致线位移传感器(LVDT)的长度发生相应的变化。最后,通过线位移传感器(LVDT)长度的变化量换算出舵面运动的角度。
4、总结
通过设计测试副翼角度的线位移传感器(LVDT)安装支架的实例说明利用CATIA 软件设计测试传感器的安装支架时有以下优点:
1) 由于CATIA 软件三维数模直观、简洁的优点大大降低了设计难度,从而减少了因对试验平台和系统件、结构件考虑不周而产生的错误。
2) 利用CATIA 软件的运动仿真功能按系统的运动原理对所设计的安装支架进行运动仿真,并在其过程中检查是否发生干涉现象,为进一步优化支架的结构提供依据。
3) 检查三维数模运动到极限和安装位置(对应副翼上偏23°,下偏23°,0°三个位置)时的尺寸,为传感器量程的选择提供有力依据。