基于BP神经网络的真空度测量精度改善方法研究
针对真空度测量精度低的现状,提出一种真空度测量精度改善方法。以热偶规为研究对象,基于BP 神经网络设计真空度测量系统。通过设计BP 网络结构,采用三种不同的算法对网络权值进行训练,以获得尽可能稳定、精度更高的BP神经网络。对三种算法由测试样本进行测试,三种算法训练的网络能较大程度地提高真空度测量精度,受热丝电流、热丝冷阻干扰影响大大减小;而且最速下降法对应的网络输出值波动较大,附加动量法次之,自适应学习速率调整法对应的输出值波动最小,波动量小于0.01。
目前真空测量的精度很低,一般会导致20%的误差。提高真空测量的精度和速度一直是真空测量关注的重要内容。提高真空测量的精度和速度可以通过改进规管结构和真空计信号转换电路两方面来实现。真空规管结构对真空测量的影响很大,不同的测量结构对应于不同的测量原理,导致不同的测量效果。在规管结构确定下,如何改进真空计信号转换电路的硬件和软件是关键。本文提出一种处理算法能够提高真空测量的精度,使得规管在外界加热电流波动或热丝冷阻发生变化时仍能输出较精确的真空度测量值。
1、真空测量系统原理及框图设计
本系统以热偶规ZJ-54D 为对象进行分析。热偶规工作原理分析: 在热偶规测量范围内,真空度的变化仅与气体热传导有关,因此在热丝加热电流不变时,热电偶的输出电动势仅与真空度有关,根据热电动势与真空度之间对应关系构建特性曲线图。假定规管的特性曲线准确可靠,且不考虑油蒸汽、炭、粉尘的沾污影响。
实际应用中,热丝的输入电流会产生波动,从而偏离标定电流,影响热偶规的输出电动势。同时,由于环境温度的变化,导致热丝冷端电阻值发生相应变化,也会对电动势大小产生相应影响。由于交叉干扰的存在,最终导致热电动势与压强之间的关系偏离规管特性曲线,从而降低热偶规的测量精度。本真空度测量系统以单个规管为对象,不涉及规管的零散性分析。
为了消除热丝电流的波动及热丝冷阻的变化对真空度测量的影响,将加热电流、热丝冷阻和热电动势信号接入信息处理网络,网络输入为3 个信号,其中U3 为被测热电动势的电压输出信号,U1、U2 为2个非目标参量的检测信号,网络输出的初始热电动势为Ec,根据热电动势和压强之间的特性曲线求出被测压强。输出量Ec为被测热电动势的单值函数,这样可以消除加热电流和热丝冷阻2 个非目标量的影响; 而且在加热电流变化和热丝冷阻波动的情况下,可使系统输出Ec,以允许偏差逼近被测目标量E,从而实现系统目标量测量精度的提高。
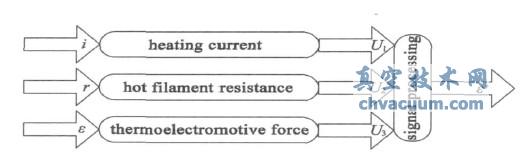
图1 真空度测量系统框图
2、真空度测量系统BP网络设计
2.1、BP网络结构设计
利用神经网络对被测信息进行分析处理,可以提高测量精度。从预测电动势的角度出发,首先确定神经网络的基本结构。本文采用3 层BP 神经网络以建立在不同加热电流和热丝冷阻条件下的电动势预测模型,以达到提高测量精度的效果。输入层节点数由输入信号的个数确定即加热电流、热丝冷阻、热电动势,则输入层节点数n = 3,中间层为隐节点层,输出层为预测输出的电动势,则输出层节点数m= 1,其真空度测量系统BP 神经网络基本结构如图2 所示。
隐含层节点数的选择是人工神经网络最为关键的步骤,本文采用试凑法确定最佳隐节点数。试凑法是确定最佳隐节数常用的方法,在用试凑法时,通过如下经验公式确定隐节点数
![]()
式中,k 为隐层节点数,n 为输入层节点数,m 为输出层节点数,A为1~ 10 之间的常数。根据经验公式,先设置较少的隐节点训练网络,然后逐渐增加隐节点数,采用同一样本集中进行训练。由于网络对应不同的样本具有不同的误差,以多对训练样本中最大者Emax代表网络的总误差E ,也可用其均误差根
作为网络的总误差,从而确定网络总误差最小时对应的隐节点数。隐层、输出层的神经元转移函数采用Sigmoid 函数,可避免神经元的输出进入饱和状态。

图2 BP 神经网络基本结构图
结论
针对真空度测量精度不高的问题,本文基于BP神经网络设计了真空度测量数据的信息处理方法。通过设计BP 网络结构,由实测样本数据采用三种算法对网络权值进行训练,以获得稳定、精度更高的真空度测量BP 网络。由测试数据检验,三种算法训练的网络较原测量数据的精度大大提高,受加热电流和热丝冷阻值变化的影响大大减弱; 同时,自适应学习速率调整法、附加动量法对应的测量输出数据波动量较最速下降法小,而其中自适应学习速率调整法对应的测量输出数据波动量最小,小于0.01。这将为下一步高精度真空计开发提供有力的技术支撑。