基于光电编码的电动执行机构行程部件的开发
介绍光电编码器的工作原理,提出电动执行机构电子行程部件的设计方法,分析光电编码器在电动执行机构应用中遇到的问题,并提出了解决方案。
0、引言
电动执行机构是工控领域中广泛应用于控制阀门开启和闭合的一种电动驱动装置,通过远方和就地控制信号实现对阀门的行程控制。传统的电动执行机构控制系统中,行程部件大部分采用机械行程和限位开关来实现阀门开度的调节和限位控制,行程控制精度依赖于行程部件齿轮组的加工工艺和装配水平,普遍存在着阀门定位精度不高的问题,而且机械式行程部件在进行阀位调试时,需要对电动执行机构进行开盖操作,给工业现场安装、调试及维护工作带来极大的不便。光电编码器是一种集光、机、电为一体的数字化位置检测装置,它具有分辨率高、精度高、结构简单等优点。光电编码器应用于电动执行机构,是一种技术上的更新与突破,实现了电动执行机构的电子行程控制方式,大大提高了电动执行机构的行程精度。
1、设计原理
1.1、电子行程部件设计原理
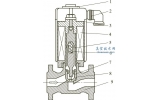
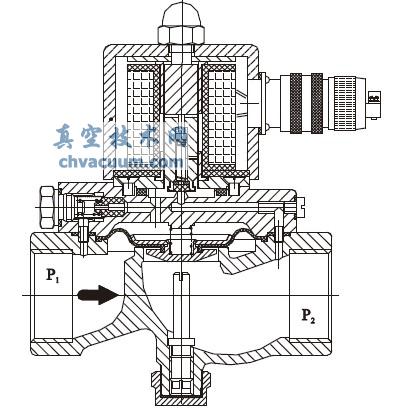
电动执行机构控制器的内部包含了位置信号感应装置、力矩感应装置、逻辑控制装置以及数字通信模块等控制模块,各模块电气控制单元由主控制器CPU统一调用管理。电子行程传动部件结构如图1所示。光电编码器作为位置信号感应装置部件,安装在电动执行机构行程轴上,行程轴另一端通过齿轮联接到蜗轮轴上。当电机开向或关向运行时,蜗杆直接带动蜗轮旋转,蜗轮的位移变化通过行程轴传输到光电编码器端,光电编码器完成位移信号的检测;检测信号再经过主控制器波形采集电路,由主控制器CPU读取两路脉冲信号,通过计算光电编码器每秒种输出的脉冲的个数,即可转换成当前电机运行速度;此外,通过捕捉两路相位相差90°的脉冲信号,并在主控制器CPU的中断程序里对两路脉冲信号进行脉宽计数和脉冲波形变化判断,可以对电动执行机构的运行速度、位移变化及旋转方向做出判断和处理。另外,在切除电动执行机构外部动力电源的情况下,手动旋转电动执行机构手轮时,光电编码器仍能保持行程计数功能,电动执行机构具备断电阀位保持功能。

图1 电子行程传动部件结构示意图
1.2、光电编码器设计
光电编码器作为电子行程位置感应装置,是一种集光、电一体,将旋转位移、速度等物理量转换成电信号的位置速度传感器。光电编码器采用相对编码计数,输出脉冲信号采用32位CPU芯片进行处理,使得电动执行机构可以应用于多回转、大行程的阀门装置中。根据DL/T641-2005《电站阀门电动执行机构》标准要求,电动执行机构行程重复偏差:≤±5°(多回转),≤±1°(部分回转)。光电编码器中光栅盘采用低线数45线设计。根据电动执行机构的机械传动结构,电动执行机构输出轴旋转一圈时,产生脉冲个数为360个,使得电动执行机构的行程控制精度保持在1°,符合标准设计要求。
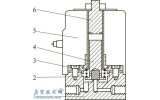
光电编码器由光栅盘和光电检测装置组成。光栅盘是在一定直径的圆板上等分地开通45个长方形孔;光电检测装置由直射式红外光电传感器电路部分组成。圆形光栅盘安装在直射式红外光电传感器当中,每圈设计成45个筋、45个孔,如图2所示。光栅盘由电机驱动旋转,旋转时筋孔交替切割红外传感器,产生两路类似正弦波的脉冲信号,经整形电路对该波形处理,最终输出两路方波信号。光电编码器安装如图3所示。

图2 光栅盘的结构
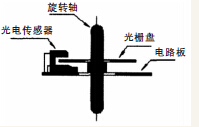
图3 光电编码器安装示意图
当电机开、关向运行,阀位发生变化时,光栅盘同步进行旋转运动,光电编码器输出两路正交脉冲,脉冲信号如图4所示。
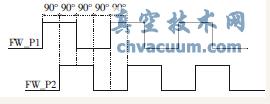
图4 脉冲信号图
2、电路设计
2.1、光编信号产生电路
光电编码器波形产生电路如图5所示。N2为光电传感器,采用双光电晶体管,光束中心间距为0.7mm,它们的节距和光栅盘上的节距相等,两组透光缝隙错开1/4节距,使得双光电二极管输出的脉冲信号在相位上相差90°电度角。波形采集电路输入端电阻R1、R2阻值为330Ω,传感器负载电阻R3、R4阻值为1.5kΩ。在光栅盘旋转运行过程中,光电传感器位置固定不动,光线透过光栅盘间断、交替地穿过双晶体管,产生两路相位相差90°的脉冲信号。
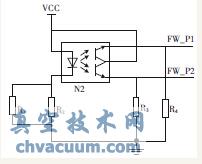
图5 波形产生电路
2.2、光编信号采集电路
波形产生电路输出的两路脉冲信号,需要经过整形电路进行波形整形,经过思密特双非门整形后,在三极管Q3、Q4集电极端输出脉冲方波。波形整形电路如图6所示。
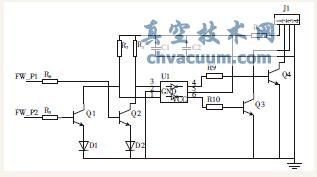
图6 波形整形电路
2.3、光编信号采集电路
光电编码器输出的两路位置检测信号,经过整形电路整形后,传送至电动执行机构主控制器CPU端口。主CPU通过端口中断方式,在两路脉冲信号每次发生跳变时,会产生一次端口中断,由CPU中断处理程序完成一次脉冲信号的计数和方向判断。光电编码器结构简单,信号稳定,数据处理比较容易,但在主电源断电情况下,需要电池供电保持阀位计数,一旦电池电压过低或无法供电,电动执行机构阀位容易丢失,给现场生产运行带来不便。所以在光编信号采集电路中设计了电池省电方式,当主电源停止供电时,主CPU自动切换至低功耗工作方式,同时关闭光电编码器供电电源。为保证主电源断电过程中阀位计数功能,采用20ms定时唤醒方式,每隔20ms打开一次光电编码器电源开关,判断阀位是否发生变化。图7为光编信号采集电路,在正常运行状态下,BMQ_C引脚输出低电平,三极管Q102导通,V9XX为光电编码器供电。当主电源停止供电时BMQ_C引脚输出高电平,三极管Q102关闭,光电编码器供电电源断开,进入省电模式。
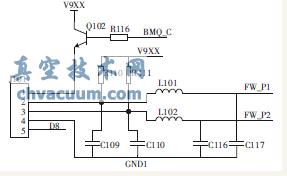
图7 光编信号采集电路
在光编信号采集电路中,主控制CPU通过采集两路脉冲信号,经过数据分析和方向判断,计算出当前阀位状态,然后通过串行总线,将阀位数据传送至人机对话模块,通过人机界面显示出当前阀位状态。
3、应用
3.1、出现的问题
电动执行机构输出轴转速范围一般为5~160r/min。不同规格型号的电动执行机构,其转速相差较大。对于高转速型电动执行机构,输出轴输出速度较快,光电编码器的光栅盘随之高速旋转,使得光电编码器输出的波形受到双二极管通断速度的影响,变为不理想的脉冲方波,导致光电编码器在高速运行时会出现性能不稳定情况。
3.2、问题分析
不同条件下(波形产生电路R3、R4阻值变化)的波形采集图如图8所示。
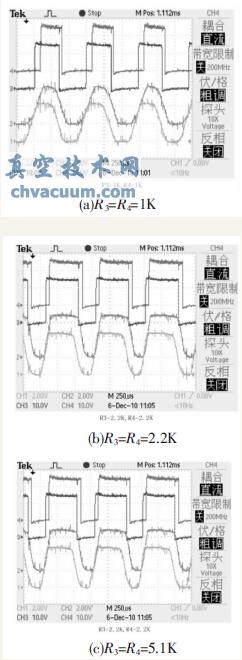
图8 波形采集图
从采集波形可以看出,光电编码器输出端信号的下降沿随着信号产生电路上R3、R4阻值的增大变得越来越平缓,经过双非门U1整形后,光电编码器输出端波形的高电平宽度变宽,低电平宽度变窄。这是因为在5V供电条件下,双非门U1的高电平门槛电压VT+约为3V,低电平门槛电压VT-约为1.7V(双非门工作原理如图9所示),所以当光电编码器输出端信号的下降沿越来越平缓时,电压下降时间也随之增加,双非门U1的输出端信号的低电平时间会变长,即低电平宽度变宽,高电平宽度变窄。双非门U1的输出端信号还要经过一个三极管反向后输出到光电编码器输出端,所以,此时编码器输出端信号的高电平宽度变宽,低电平宽度变窄。受此影响,光电编码器两路输出信号形成的相交脉冲信号也比较窄,这样就很容易造成光编信号采集端信号采集困难或造成脉冲信号丢失。从图上数据分析,当R3=R4=5.1K时,相交脉冲信号间隔时间约为50μs,此时光栅盘转速约为1875r/min,当转速达到2500r/min甚至更高时,间隔时间更短,从而影响CPU中断读取时间,造成数据丢失。因此,传感器输出端电阻R3、R4阻值取值不能太大。
另外,根据电路分析及采集信号图,光电编码器器输出端信号的电压峰值随着R3、R4阻值的减小而变小。由图8(a)可以看到,当R3=R4=1K时,VR3、VR4约为4.1V,但在实验过程中发现,R3=R4=1K时,VR3、VR4有时不能达到2.7V,即达不到双非门U1的门槛电压VT+,所以会造成光电编码器没有信号输出。在同样的条件下之所以会出现两种不同的结果,是因为器件的离散性造成的,传感器的输出信号为模拟信号,所以传感器的输出效果跟器件本身有很大的关系,即同一器件在同一条件下有可能产生不同的模拟信号,双非门U1输出端的信号就会随之变化,如果相差较大,那么得到的结果也会有较大区别。因此,传感器输出端电阻R3、R4阻值取值也不能太小。另外,从图8(b)、(c)中可以观察到,当R3=2.2K、R4=2.2K时,VR3、VR4约为4.4V;R3、R4取值大于2.2K时,VR3、VR4也都约为4.5V。
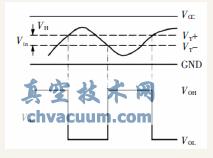
图9 双非门工作原理图
综合分析考虑,为适应高速型电动执行机构和不同的电源供电方式(5VDC、3.3VDC),光电编码器信号产生电路R3、R4阻值大小设置为1.5K较为合适。
4、结语
采用光电编码器作为电动执行机构行程检测部件,使电动执行机构实现了电子式行程设计,提高了阀门行程精度和阀位分辨率,实现了阀门的精确定位,有效地简化了电动执行机构的调试过程,提高了现场调试效率,方便现场维护。