Һ��ִ�л����ڴ��ѻ�װ�õ�Ӧ��
������Һִ�л������п���ȷ���ȶ��Ժá��ɿ��Խϸߵ��ص㣬�ڴ�װ����Ӧ��Խ��Խ�㣬���Ĵӹ���ԭ���������г��ֵ����⼰�����������������������Ӧ�Ľ����������Ե�Һִ�л����ķ�չ���м�˵����
�������Ŵ��ѻ�װ���������ڲ����ӳ����ؼ��豸�����ȶ��ԡ��ɿ����ܶ���������ֱ�����������ã���Һִ�л������Ǵ�װ���йؼ����ڿ����豸֮һ������װ�û��������������龲Ҷ����ϵͳ�����ֻ�����ϵͳ�ϴ���Ӧ�á����ڷ�����ϵͳ�����������ƴ�����ѭ��������֤������ϵͳ������ƽ��;���������ڵ�˫���������������������ѹ������֤������ϵͳ��ѹ��ƽ��;���������ϵͳ���õ�Һִ�л����Ծ�Ҷ�ǶȽ��е��ڣ���������ϵͳ����;�����ֻ��������ϵͳ��Һִ�л���Ҳ��ʼӦ�ã��������ֻ���ת���Կ��Ʒ�Ӧϵͳѹ�������������������£�Ҫ���Һִ�л�������״̬�ȶ�������ƽ�ȡ��ɿ��Ըߣ��ڹ���״̬�¶���ȷ�����������Ա�Ͷ������¶���һ��ȷ��ʹ��������Ѹ�ٴﵽ�Ա�λ�ã���֤װ�ð�ȫ���������顣�������ݵ�Һִ�л����������е����⼰����������̽�֣�����˾���ĸĽ������������䷢չ��������˼�����
1����Һִ�л����Ĺ���ԭ��
������Һִ�л������ɵ�������ϵͳ����Һ�ŷ��ס��ͱü�λ�ƴ���������ɡ�����������ϵͳ����˽���4-20mA���������źž������ת��Ϊ0-10V��ѹ�źţ�ͬʱ����λ�ƴ������ֳ���õ�ʵ�ʷ�λ�����������ת��Ϊ0—10V��ѹ�źţ��������ŷ��Ŵ����бȽϲ�����ֵ�źţ�����ѹ�Ŵ��ʷŴ��������Һ�ŷ������������˶����Ӷ�����ִ�л������չ涨λ�ö�����ֱ�������ź���λ�ƴ����������ź�ƫ��ֵΪ�㣬��ʱ�ŷ����Ŀ��Ƶ���Ҳ�ӽ��㣬�ŷ����ﴦ����λ����Һѹ�������ʹ���л���ͣ�����������ź����Ӧ��λ���ϣ��Ӷ��ﵽ��Һִ�л����Զ����Ƶ�Ŀ�ġ�
2��������������Һִ�л��������й��ϴ������Ľ���ʩ
2.1��Һѹ����Ԫ�������е�����
2.1.1����Һ�ŷ���
�����ŷ�����ΪҺѹ����Ԫ���Ƿdz��ؼ���Ԫ�����������ܾ������ƾ��ȺͶ�̬���ȶ��ԣ����Ŀɿ��Ծ�������������ϵͳ��ʹ�����������������ǽ���С�ĵ繦���ź�ת���ɽϴ��Һѹ���������ʵ���źŵĵ�/Һת��������ɷŴ����á�
�������ڵ�Һ�ŷ������õ���˫���쵲��ʽ�ṹ�����Һѹ������Ҫ��ϸߣ����뱣֤����NASI638A������7���������й������׳��ַ������������ִ�л������������صij��ַ�λ��“����”����ɹ��������ϴ����ֽ������ܽṹ�ŷ���Ӧ�ý϶࣬��ṹ�ϲ��ø�ʽ����������庸�ӣ�������Ϊ�ȵ������������������ţ���һ�ָ��������������鷽���������Ʒ������п���Ⱦ����ǿ���ɿ��Ըߡ��ֱ��ʸߵ��ص㣬�������������ܶ���״̬�£��ŷ���һ�㱣��ԭ��λ�������ϱ�������“����”����ij��֣���ȫ�����˺ܴ����ߡ�
������ʵ�����й�����Һѹ��ʹ��Ҳ��Ӱ���ŷ�������״̬������֮һ���ڱ���������ʹ��N32����Һѹ�ͣ��ȴ��������ļ�ʹ��N46��ĥҺѹ�ͣ�Һѹ���˾�����5um���ң�����������20-50��֮�䡣��Һѹ�ͳ���ʹ��ǰ��Ӧ��֤Һѹ�;���—������—����—��ѭ����Сʱ���ϣ�����Ͷ�ŷ���������Һѹ����Ⱦ�ŷ�����
2.1.2���������
����λ�ƴ������DZ�·��·����ϵͳ�е���ҪԪ���������ܵĺû�ֱ��Ӱ�쵽����ϵͳ�Ŀ��ƾ��ȺͿɿ��ԣ���Ͷ�������û�Ƭ����ʽ�����ʽֱ�ߡ���λ�ƴ�����������ʽ���ʽ�������ȡ����������������λ�����źţ������ź��������źž��ŷ��Ŵ���ת���ɵ�ѹ�źŲ����жԱ��γ�����źţ�����ִ�л����Ķ��������������ֹ���ʱ����Һִ�л�����������ֱ��ϵͳ��λ���������ķ������ŷ��Ŵ����Ϸ�λ���ٴ�������ʱ����趨ֵ������
������Ƭ����ʽ��������Ҫ�������ڻ�Ƭ�뵼��Ƭ��ȷ��֮�����ĥ����ɽ�ȷ����������ź���Ծ������״̬���ȶ���������ʽ�Ĵ��������Ͻ϶࣬Ӧ���иĽ�����Ͷ�ÿɿ��Ե͡�����ʽ��д������������ҪΪ�������̼��ɶ�����Ȧ����������ϻ������Ĺ��ϣ������й��Ͻϻ�Ƭ����ʽ�������͡�
��������ʽ�����Ȧ�������䴫�����̶������ڣ������ȶ��ԡ��ɿ����ܽϸߣ������г���������Ҫ���ܷ��й©��Һѹ��й©�������ڣ���ɽ�ȷ�������ӣ�ʹ��λ�����źŲ���ƫ����жϣ�ʹ�䲻������������
2.1.3���ŷ���
�����ŷ�������Ҫ��֤������ѹǿ�ȸߣ�����DZ�֤��Ͳ�����֮�伫С�ļ�϶�͵�������ӦС��϶����֤�����ܷ�Ŀɿ��ԡ�
���������г��ֵ���Ҫ�����ǻ����ܷ�ϻ����������״��ͣ�����ϳ��ּ��ʽϵͣ������ݹ�����������жϹ���ԭ�����ڵ����ͻ����ŷ��Ľṹ���ܷ��ͬ�����ϵ�����Ҳ���ڽϴ���졣�����Ļ�������˫����ڣ������Ļ������ǵ�����ڣ��������źŸ���(��/��)ʱ�������������ڷ����˶����������������ܷ�ϻ������״��͵�ͨ��������������ѹƽ�⣬�����������������ͬ�����»���������;���������������ͬ(�������ǵ������)�������˲����ѹǿ�ϴ��·����л����˲��˶���ֱ��������λ���������ֹͣ����������λ������λ�趨�ĸ��ٴ���������ʱ����������Ե������ܷ�ϻ������Ĺ���������������ڷ������к�ֹͣ����;�����Ĺ���������������ڷ������к����л����˲����У�ֱ����λ��ŷ�������λ��������ﵽƽ��λ�ö�ֹͣ�˶���
2.1.4������Һѹ��(�ͱá���Ż���)
����Һѹ����Һѹϵͳ����Ҫ����Ԫ�������������û�ֱ��Ӱ�쵽Һѹ����ϵͳ�Ŀɿ��ԣ�����ʹ�ý϶���ǹ���ҶƬ�ã�����ѹ���ȶ����ͷ�й©�����ڷ�Χխ������������ʹ�á�ά������������������ý��ڱ��������ã��������ĵ���������ѹ���������еģ�������ѹ��ƽ�ȣ��������ܿɿ��������͡��������ڳ����ص㡣��Ż����ǿ��ƻ����д������ڵ�Ԫ��������ֹ��ϵ�Ƶ�ʽ϶�(��������λ��Ż���)����Ҫ�����Ƿ��│����ԭ��������������Ⱦ�������������ij�����ʹҺѹ�;���Ż��������ͣ���ɷ����������˹��ϵļ����ף�й����ϵͳѹ������ŷ��������ְ�����Ż���������ص��ԣ��粻�������ص�֤����Ż������������������װ���ɡ�
2.2�������DZ�ϵͳ�Ĺ���
���������DZ�Ԫ���ļ���������ߣ������DZ�Ԫ���͵�������������ȶ��Խϲ�ֽ�����������ʯ����е�������ĵ�Һִ�л������ǾŽ��DZ��������IJ�Ʒ���ŷ��Ŵ����������ȽϹ��ء�
3����Һִ�л����ڻ��龲Ҷ����ϵͳ�ϵ�Ӧ��
3.1������ԭ��
�������ڵ�Һִ�л�����ʹ���ȶ��Ըߣ��������ʹ��Ӧ�÷�Χ�����ֹ������������Ҷ����ϵͳҲ��̲����˵�Һִ�л�������Ҫ������ʽΪ����Һ�ŷ�������·�͵�ŵ�����·����ʹ�ã�ͨ����Ҷ�Զ�/��Ҷ��λ���л���ִ�����ֹ���״̬����Ҷ�ŷ�����ϵͳҺѹ����װ��ͨ��Һѹ������ʽ�����Ƶ�Һ�ŷ����Ľ�����·������·�������������������״̬ʱ��Һѹ����Ż����ڵ�ͨ״̬����Һ�ŷ�����ϵͳ��������źż����������ʱ���ھ�Ҷ�Ƕȣ��ﵽ�ʵ������������ڷdz�ԭ��(�ŷ�����ϵͳ��ij����Ԫ���������ϣ���������������)ʹ��Ҷ�Ƕ����趨ֵƫ��ϴ����ȫʧ��ʱ����λ��ŷ������ϵ�ͨ�磬ʹҺѹ�����ڹر�״̬���жϵ�Һ�ŷ���������·������·����ʱ����Ҷ�͵���������ʱ�����Ҷ�Ƕ�����Ҫ���λ��ƫ��ϴ���������һ��Ż����ڣ��Ե㶯��ʽ�Ծ�Ҷ�ǶȽ��������������ŷ��������ƶ���ʹ��Ҷ�Ƕ�������С���ﵽָ����λ�á���ʹ��Ҷ������ȫʧ�أ����Լ���ά���������������
3.2����ϵͳ��ȱ��
�������ڿ��ǵ���ȫ���е�Ҫ��Ҷ�Ƕ�25��ͽ���ͣ��Ҫ��Ҷ��λ(һ����60������)���ڵ�Һִ�л��������źŶ�ʧ�������źŶ�ʧ��λ�����ź�ƫ����λ���ܣ�������Ͼ�Ҷ�Ƕȷ����ϴ�ı仯ʱ����λ���ܣ�ֻ����Ϊ����������λ��ʹ��ϵͳ�İ�ȫ�Դ������������DZ�ϵͳ������ȱ�ݣ����Ҫʾ��Һִ�л����������ŷ����Ŀɿ��Լ��ߣ�����ϵͳ�Ĺ����ȶ���Ҫ��֤��
�����Ľ������ɽ�ϻ�������������ϵͳ��������λ��ŷ����ڷ����ź��������ź�ƫ��ϴ�ʱ������λ����Ͷ�Ա�ʱ�Զ����������Ʒ�λ����Ӧλ�á�
4����Һִ�л���ʹ�ü������
4.1�����ڵ�Һִ�л����ڹ��϶ϵ�״̬����λ��ŷ�������ʽ��ѡ������
�������ڻ����������ڴ�װ���е���Ҫ���ò��Զ���������ڹ���״̬��ִ�л����İ�ȫ�����Ƿdz���Ҫ�ģ�Ҫ���ǵ��ϵ�����·��Ķ��������һ����˵��λ��Ż���Ϊ�ϵ������������λ����֤�ڹ��϶ϵ�����±��ַ�λ��������������ϴ�Ӱ�죬����ͶԵ�ŷ����ϵ繤������Ҫ��ϸߣ�Ҫʹ�ÿɿ��Ըߵ�Ż���
4.2��UPS��Դ��Ӧ��
����Ϊ��ֹ�ϵ���Ϻ������Ͳ��ɵ���״̬����������Ӧ����UPS��ԴΪ�DZ�����ϵͳ�ṩ��Դ��ȷ����ϵͳͣ��Ĺ���״̬�£���������������ѹ���Ʒ�λ�ﵽ��ȫλ�á�
4.3����������
��������ʱ�ŷ��Ŵ����������ʾ10����������ҪΪ��Դ��ѹ���ŷ���������ѹ��ƫ���źŵȣ��Ž��DZ�������ʾ���������λ��ŷ��Ĺ���״̬(�����ϵ����/���������λ)�����ڲ�����Ա�IJ�����ά������������������ڹ����ж��������ֶΡ�
4.4�����ڵ�Һִ�л����ؼ������DZ����ư忨�ĸ���
��������װ���������ڲ����ӳ������豸�Ŀɿ��ԡ��ȶ��Լ��������е�ƽ����Ҫ����ߣ������ŷ��Ŵ����ϵ��DZ����ư忨���������Ŵ��ͷ�������װ�ÿ���ǰ��Ӧ������У��ϣ�������ȫ�г̵��Ժϸ�������������з���������Ҫ���������µ��ԵĿ����Էdz�С����ʹ���Ե���������ȷ�Էdz��ͣ����Ҳ��ܽ���ȫ�г̵��ԣ���˽�����װ��ͣ������ʱ�Թؼ��ط���������ͬ�İ忨�����Ժ�һ��һ����ȷ�����Ϻ�ƽ�ȸ���Ͷ�á�
4.5���Ա�״̬�ĵ��ڷ�ʽ
������Һִ�л������Ա�״̬�µĹ�����ʽ����Ҫ��ͨ����Ż����ڡ���Һ�ŷ���������ͬʱ�������ڷ�ʽ����������ͬʱ�������ڷ�ʽ��Ϊ�ɿ���һ���涯���ٶȿ죬��һ����ȷ����ijһԪ����������ʱҲ�ܱ�֤�Ա�����������
4.6����Һִ�л������ճ�����
�����е�װ���ط����̻���ڵ���������·˫�����������ڴ���һ��λ�ã�һ���洫�����ش�λ��������һ��������ѭ��������������Ԫ����������Ӧ��ִ�л������о����Ե�С��Χͼ��������֤����ϵͳ���������С�
5��ִ�л����ķ�չ
�������ż���������������ƺ㷺Ӧ�ã��������Ե�-Һϵͳ���п����ѳ�Ϊ��е��ҵʵ�ֻ���һ�廯��һ����Ҫ�ֶΣ����ֿ����ڵ�ǰ����Ϊ��ʵ�ֶ�Һѹϵͳ���٣��߾��ȿ��Ƶ�������ķ���֮һ��
5.1������ʽ������ִ�л���
�����S�ſɱ�̿�������PLC����ϵͳ�Ĵ���Ӧ�ã��Կɱ�̿�������PLC������������ִ�л������ֲ�Ͷ�ã��乤���ص����£�
����(1)���������������ź�ͨ������д�뷽ʽ�����롢��������봦��������ȫ���룬ȫ���ֿ��ƣ������ԭģ���ź��ܻ�������Ÿ��ŵ����⣬�����ȶ��Եõ��ϴ���ߡ�
����(2)����ʧ�������ݷ����źű仯�ͷ�λ���˶����ƶ�������ʹ������������ȷ��������������λ�������ã����������ϵͳ�Ŀɿ��ԡ�
����(3)�������ŷ������Զ���У���ܣ�ʹ�乤���ȶ��Եõ��ϴ���ߡ�
����(4)������ʾȷ������������ÿ�����϶�Ӧ��Ӧ���ϴ��룬ʹ�����ж�ȷ����ߡ�
5.2��Һѹ�����ֿ������
�������ַ���ֱ�������ӿڶ�����D/Aת��װ�ã��뵥�����ŷ����ͱ�������ȣ����нṹ�������Ժã��ɱ��ͣ�����Ⱦ��ǿ���ظ����ܺã������ȶ��ɿ����ܺ�С���ŵ㣬������Զ�����ϵͳ�ж���һ�ġ�
������������ƵĹ۵�֣��ɷ�Ϊ����������ƺ���������������֣���������������У������㴦���������źţ���D/Aת��Ϊ�������е�źţ�����ģ��ʽ����ͨ�������������������磬�����ԷŴ��������ŷ����ͱ�������
������һ���棬�������������ͨ����λ���ź����Ӧ��һ�������ź�ֱ��ʹ������-ͨ�������γɼ�ϵ��������壬�Ӷ��ﵽ����ƽ�����������Ŀ�ġ�
������2�����ٷ�������ѹ�����ͬ�ĵ���ʽҺѹ��(ͼ1)����V1��V2Ϊ����״̬��Һѹ�ײ�������V1��V2ͨ��ʱ��������Һѹ�����һ������ƶ������ƶ��ٶȵĿ����Ǹ���Ŀ��λ����ʵ��λ��֮���PWM�źſ����������ﵽĿ�ģ���ֵ��С��������ȱ�̴Ӷ����١�
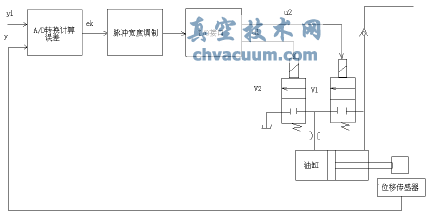
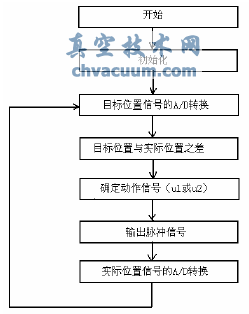
����PWM����λ�ó���Ļ���˼·�ǣ���Ŀ��λ���ź�r��ʵ��λ��y֮��e��Ϊģ����źţ�ͨ��A/Dת���������������ek������;��������kp���������ͨ��������ʱ��(t=kpek)���ɴ���ȷ��ͨ��ʱ��;������ek�ķ��ſ��ж�Ӧ�ķ�(u1��u2)��Ϊ����߿��Ƹ�λ�õľ��Ⱥ��ȶ��ԣ�����������δ��ʹ����������С�������t1������ʱ��t2�����������ȡ�洢����ͼ����PWM���ݵ��������ٵ�ŷ�����Һѹ�ij����ͼ��
������������ʱ���Ժ̿������ֻ��ѳ�Ϊ�˱�Ȼ�ķ�չ���ƣ��ڵ�Һ���Ƽ�������Ӧ�����ַ�ʵ��ֱ�����ֿ��������ֻ����������������չ���о�����ͨ����չ�����͵�ϵ�����ַ���������Ӧ���ڵ�Һ����ϵͳ��ͨ�����ֿ�������Һѹϵͳ����Ķ�������ʵ��ֱ�����ֿ��ƣ��Ӷ��ﵽ��Һ���Ƽ������ֻ���Ŀ�ģ����γɾ�������֪ʶ��Ȩ�ġ����صĵ�Һ�����ŷ��Ŀ��Ʒ�����