气动活塞调节阀工作不稳定原因分析及处理
分析调节阀工作不稳定故障原因,针对故障原因对增速器、阀门定位器调试参数和设定值进行修改,解决了阀门波动和工作不稳定的问题。
重庆建峰化工股份有限公司第二套大化肥装置,合成氨系统采用KBR技术,尿素系统采用荷兰Stamicarbon技术,年产为45万吨合成氨、80万吨尿素。合成氨、尿素装置中调节阀气动控制配置的附件以智能数字定位器为主,定位器的控制精度比较高,例如工艺空气压缩机防喘振调节阀(PV4050),阀门行程比较长,在调试和使用中出现波动或工作不稳定的故障,影响空气压缩机防喘振控制以及出口压力稳定性;尤其是双气缸配单/双输出的智能定位器+增速器等附件的调节阀,如工艺段间放空阀(HV1108、PV1032)和压力控制阀(PV1040)等,在调试过程中出现工作不稳定或波动现象,导致仪表控制回路波动,进而影响工艺过程控制。
1、气动控制回路原理
气动活塞式调节阀执行器,一般采用不同口径气动活塞式结构。这种结构通常产生较大的输出力(力矩),性能可靠,结构紧凑,维修方便。这套系统包括1个储气罐,2个换向阀,1个锁止阀和1个止回阀。在这套系统中,止回阀的作用是保持气罐的最高压力,锁止阀检测压缩空气的供气压力,当压缩空气低于锁止阀的设定值时2个换向阀失去驱动压力换向阀动作,气罐气进入气缸一个口,驱使阀杆动作到失气位置,气缸的另一个口将气体排出;系统失气时,气缸的体积小,不能使阀门动作到它的失气位置,只能靠外带的储气罐补充所需要的气体。HV1108、PV1032上缸进气的控制是由减压阀给定一个恒定的压力信号,通过增速器(升压器)给执行机构的上气缸供给一个恒定的气压,定位器为下缸供气,实现调节阀的准确定位;PV1040则是由定位器为上、下气缸提供控制信号给增速器,控制上、下气缸的供气,实现调节阀的准确定位。
图1为段间放空阀及压力控制阀气源供给中断时阀门关闭(FC)状态的气动控制回路流程。在没有虚线连接的管线连接时为HV1108、PV1032气动控制回路;在使用虚线连接的管线连接时取消与增速器连接的减压阀及进出口管线,则为PV1040气动控制回路。
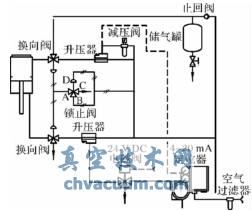
图1 段间放空阀及压力控制阀气动控制回路流程
2、故障原因分析
在调试过程中,给定信号出现阀门定位时间长或在小开度不稳定,阀位偏差大等现象;在投入使用中出现工艺控制参数不稳定,压力波动大等故障现象。真空技术网(http://www.chvacuum.com/)认为主要原因是由于定位器及附件参数设定不合适和调试不到位。
以上述HV1108、PV1032、PV1040为例分析阀门的故障原因,在调试时用HART通信器测得的各阀门的数据见表1~3。
表1 HV1108的测试数据
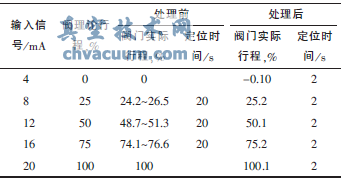
表2 PV1032的测试数据
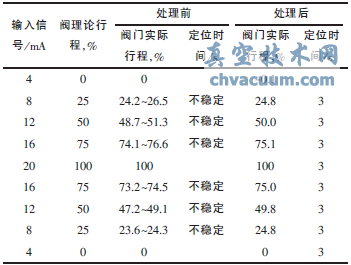
注:输入信号列到20mA后再到4mA是仪表调节阀正反行程变差调整,表3同理。
表3 PV1040的测试数据
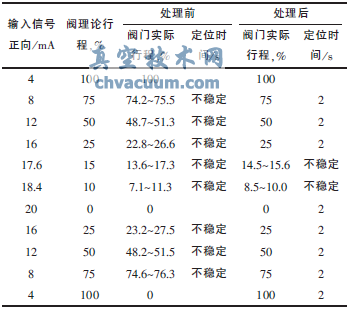
根据表1~3的测试数据可以看出在处理各阀门的主要问题是:HV1108在中间行程定位时间较长,波动范围在2%以内;PV1032在中间行程稳定性差,波动范围在2%,且反向信号出现单向偏差阀位偏低,开阀时全行程时间太长(达23s);PV1040在小开度不稳定,阀行程波动较大。
3、处理措施
3.1、定位器不稳定的处理
1)调整增速器的灵敏度。增速器的灵敏度调整方法和顺序:调整增速器的灵敏度→执行自动设定程序→动态特性满意→结束。先调整上缸、后调整下缸进气的增速器并做记录,避免上下同时调整出现混乱。对于配置IL-100型增速器(HV1108、PV1032)的调节阀,调节增速器的针阀,用来控制空气的流量,从最高灵敏度(针阀完全关闭)逆时针转动针阀1.5圈降低灵敏度。其他型号增速器如PV1040的场合,先逆时针转动针阀,降低灵敏度。
2)定位器参数调整。动态特性参数选择,决定控制阀的PID计算参数,通过选择执行机构的尺寸消除阀门的不稳定。通过HART375通信器,选择[Mainmenu](主菜单)—[Config&Calib](配置和标定)—[Dynamicchara](动态特性)—[Actuatorsize](执行机构尺寸),从参数0至9(PARAM0toPARAM9)选择确认执行机构尺寸,观察阀门的阀位的稳定性,选择稳定性最好的一个进行保存。带有增速器的调节阀,一般选择PARAM1和PARAM9效果比较好。
3)摩擦力的选择。在定位器参数中选择Glandpacking(压封填料类型),选择HEAVY,MEDIUM或LIGHT(重,中或轻)。对于阀门的密封填料,采用石墨填料的一般选HEAVY,F4填料选LIGHT。也可以选择HEAVY,MEDIUM或LIGHT观察阀位动态特性,选择最好的一个保存。对于阀门HV1108/PV1032/1040,将MEDIUM改为HEAVY后动态稳定特性明显增强
4)PV1032阀门定位器安装位置选定。当阀门出现单向偏差,单向不稳定时,调整定位器的安装位置,水平上移,保证阀门在50%阀位时反馈杆的水平。
5)对于选择好的参数必须进行保存,最后对定位器进行自动校准(自整定)并测试阀门的动态特性。
3.2、效果
从表1~3可以看出,采取对阀门定位器、增速器和安装位置进行调整等处理措施,基本消除了定位器工作不稳定故障。PV1040在小开度仍有1%~1.5%的波动,是由于工艺开车处理时间较短,没有完全调整到最佳状态,但在使用过程中能够满足工艺使用要求。
工艺空气压缩机防喘振调节阀PV4050(气动控制原理与PV1040差不多,在锁止阀前加电磁阀,储气罐连接下汽缸换向阀接口,在汽缸进、出口都配有两组升压器)在空气压缩机运行中低阀位9%时运行都很稳定,仅0.5%的波动范围,完全满足工艺使用要求。
4、结束语
导致调节阀工作不稳定的因素比较多,调整定位器不能单一的选择自动整定消除故障,必须通过修改附件参数,调整定位器内部设置和安装位置等手段,去解决调节阀的不稳定性问题,使调节阀处于最佳的工作状态。





