渐开线型罗茨真空泵转子型线的改进研究
通过对罗茨泵转子型线关键指标的分析,找出限制罗茨泵工作效率提高的原因,在此基础上,对传统渐开线型线进行改进。与传统型线关键指标的对比表明: 改进后型线的径距比及面积利用系数有了明显的提高,转子型线平滑度得到改善。
罗茨真空泵因启动快、功耗少、运转维护费用低、抽速大、效率高而被广泛应用于真空冶金、化工、食品、医药等行业中。罗茨真空泵是一种双转子回转式容积泵,其工作原理类似于齿轮泵,依靠两个相互啮合的齿轮,分别带动两个转子相互啮合实现抽气的功能。要保证其正常平稳地工作,最为关键的是两个转子,而转子的核心则是型线。转子型线的设计合理与否,直接关系到真空泵的各项性能指标。因而,转子型线的设计显得尤为重要。传统的转子型线主要分为3 个大类: 渐开线型、圆弧型、摆线型。圆弧型和摆线型均由于面积利用系数较低、密封性能较差,而得不到广泛应用。目前,渐开线型由于便于加工且密封性能好而被广泛采用,但是,依然存在因干涉原因径距比、面积利用系数得不到提高的问题。作者针对目前传统渐开线型线存在的问题,提出了一种改进后的渐开线型罗茨泵转子型线。
1、罗茨真空泵设计的主要参数
1. 1、径距比
径距比是指罗茨泵转子最大外圆半径Rm与1 /2中心距的比值,即Rm /a。其大小直接影响到叶型、面积利用系数、转子刚度、叶轮啮合性能。因此,在转子型线设计中,径距比是一个极其重要的参数。如图1 所示。
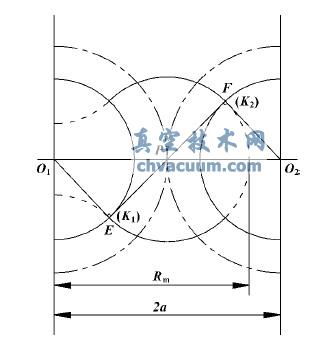
图1 叶型发生干涉的极限位置
随着径距比Rm /a 的变大,渐开线啮合极限点K1、K2逐渐远离点P,逐渐靠近对应切点E、F。当径距比达到一定极限时,即Rm /a = ( Rm /a)max = 1 +
E 与K1、F 与K2分别重合。而当Rm /a > ( Rm /a)max时,渐开线终点附近的一段型线,将不能与另一叶轮渐开线始点附近的一段型线啮合,这就发生了叶型干涉现象。
正因为这个原因,导致在中心距固定的情况下,转子型线的改进受到了很大的限制,从而罗茨泵的工作效率难以大幅度地提高。
通过主要参数变化的对比,可以看出改进后的转子型线相对于传统转子型线具有明显的优势,径距比突破了传统转子为防止干涉而所能取得的最大值的界限,而有效地避免了干涉。改进后的转子相对于传统渐开线转子的面积利用系数也有了10% 以上的提升,从而提高了罗茨真空泵的工作效率,并且改进后转子的叶峰部分型线圆弧半径加大,当处于工作状态时,转子与壳体之间相对结合更为紧密,减少了空气的泄漏,进一步提高了罗茨泵的工作效率。其次,叶峰部分型线比较平滑,当两转子在啮合时,气体均匀变化,降低了气体因剧烈变化而产生的噪声,对罗茨真空泵的整体降噪起到了重要的作用。
4、结束语
传统的罗茨泵转子型线因存在干涉问题,使得罗茨泵工作效率难以提高,发展缓慢。针对这一难题,通过研究,作者对转子型线进行了改进。通过改进后相关数据的对比,可以看出,径距比及面积利用系数有了明显的提高,进而,罗茨泵的工作效率也得以提高。另外,改进后的转子型线变得更加平滑流畅,这对降低噪声以及后期转子的加工都十分有利。