多级爪型干式真空泵原理分析
多级爪型干式真空泵的结构对于其材料消耗、体积、能耗等性能有着非常重要的作用。本文介绍了北京朗禾科技的最新型结构———螺旋反爪结构,就其原理和国际上最经典的两种结构:螺旋型(德国)和反爪型(英国)做了介绍和对比,说明螺旋反爪结构可以大幅度缩短泵的长度、节约大量的材料、提高抽气效率、降低加工精度、提高抽气性能,对爪型干式真空泵的发展和普及有很好的推动作用。
多级爪型干式真空泵是上世纪末快速发展成熟的新型(变容积)真空泵,真空技术网(http://www.chvacuum.com/)调研了其有如下突出优点:泵腔内无油、对被抽容器没有油污染、并能直排大气、单泵就能达到3 Pa 等,在电子行业得到了非常广泛的应用,替代了油封机械泵以及滑阀真空泵。由于其性能卓越而越来越广泛的应用于航天、核工业、化工、制药、环保等行业,并呈逐年上升的趋势。其主要的结构型式有螺旋型和反爪型,其结构各有优势,相比较而言反爪型比螺旋型优势更明显。但由于其结构限制,泵的抽速目前基本上只做到小于600 M3/h,不能够满足化工和制药等大抽速的需要。
北京朗禾科技结合以上两种结构的优势,推出螺旋反爪结构,达到更少材料、更低能耗、更好维护、更大抽速的效果,而且能适合化工、制药、环保等领域的需要。
1、传统经典爪型泵的工作原理
(1)单级爪泵的工作原理:
如图1 所示,在图1a 位置A 腔和进气口4接通,随着转子对的同步反方向运动A 腔容积变大,气体就吸入泵内,B 腔内的气体也在转子对的作用下得到了逐渐压缩,我们称为吸气过程;图1b 位置A 腔容积继续变大,继续吸气,同时,B 腔的容积在转子对的同步反方向运动下逐渐变小,运动到和排气口接通的位置气体通过排气口排到下一级,这个过程一直会持续到图1c 位置,吸气和排气同时进行,简称为吸排气过程;在图1c 位置A 腔达到了最大容积,吸气结束和B腔的容积达到了最小,排气结束。转子挡住了进气口和排气口,起到了自动关闭的作用;在图1d位置随着转子的运转,B 腔内没有被排出去的气体和A 腔内被吸入的气体混合到了一起,既不吸气也不排气,我们称为过渡过程;
不间断重复以上3 个过程,达到了连续不间断抽真空的目的,由于泵腔内无需用水或油等介质,有如下的优势:能抽各种化学气体、特殊不锈钢材料制做的爪泵还能抽腐蚀性气体。在航天、制药、化工、核工业等行业得到了广泛的应用。
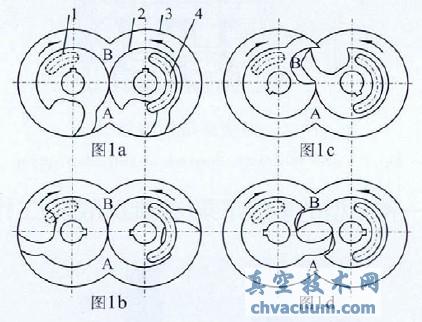
1.排气口; 2.转子对; 3.泵体; 4.进气口
图1 单级爪泵工作原理图
(2)常见的多级爪泵原理:
如图2 和图3 所示,在第一级的排气口位置,设计一个长长的通道,以便于第一级排出去的气体能进入第二级的进气口。同时为了保证在第一级排气时,第二级泵体3B 开始吸气,所以第二级的同步转子对比第一级落后一定角度的相位差,通过研究发现,相位差在30°到120°之间都是合理的,最合理的角度还需要进一步研究。通道不能设计得太小。依此方法来设计第三级转子对以及第四级转子对和通道,就会发现各级转子对依次沿着转子对旋转的方向落后于上一级,串联在主轴上就呈现了螺旋型布局,称为螺旋型。
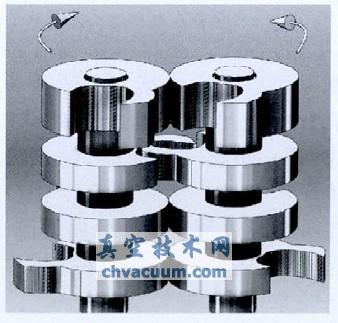
图2 螺旋型结构的三维示意图
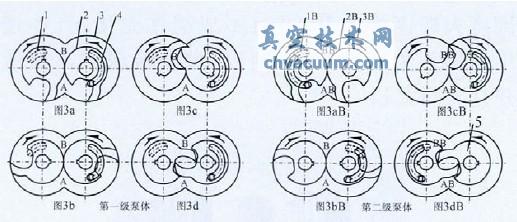
图3 螺旋型结构原理图
其结构有如下优点而被广泛采用:转子的放置都如上图放置,从上世纪80 年代末期欧洲几家企业生产过这样的泵以后,产品在市场方面得到了非常好的反应和使用效果,目前在中国均得到了最广泛的采用。
如图4 所示,其工作过程为:气体从顶盖进入沿箭头方向进入到第一级泵体内,通过第一级转子对的作用,压缩气体沿箭头方向继续进入第一级隔板内,分别通过第二级泵腔、第三级泵腔和第四级泵腔,气体进行了比较慢长而又复杂的运动。
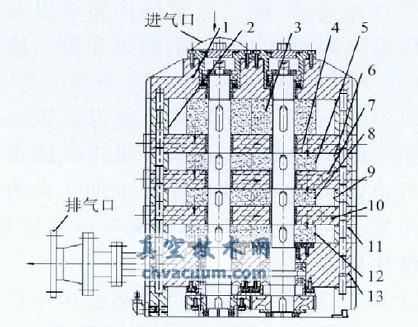
1.顶盖;2.第一级泵腔;3.一级转子对;4.第一级隔板;5.第二级转子;6.对第二级泵腔;7.第二级隔板;8.第三级转子对;9.第三级泵腔;10.第三级隔板;11.第四级泵腔;12.第四级转子对;13.底座
图4 四级泵结构原理图
经过大量的实验以及用户的使用反馈,从加工成本和制造方面有如下的缺点:①第一级隔板、第二级隔板以及第三级隔板中间的气体通道长,不好加工;②加工完成后气体通道还需要有工艺堵来密封,容易泄漏;③隔板的厚度较厚,导致泵的长度较长,同样的四级泵比别的干泵要长,重量要重;④隔板内有死空间,不利于做防腐蚀泵等处理。
从性能和使用方面有以下优缺点:①由于充分利用了爪型干式真空泵的原理优势,转子压缩过程中能自动关闭进气口和排气口,所以,很容易做到较高的极限真空。②由于气体通道流导往往由于结构的制约,容易形成较大的气体流动阻力,所以,泵入口压力增加到一定值后,电机的电流将大幅度的上升,并且不成线性变化,气体过压缩的现象特别突出,所以,破空阶段效率很低并且时间太长。
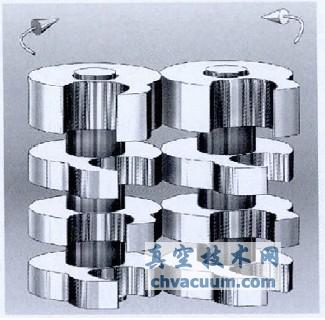
图5 反爪型结构的三维示意图
(3)“反爪泵”的原理和性能分析:
从图6 可以看出,第一级的排气口1 和第二级的进气口1B 在同一位置,第一级的爪型转子对2 和第二级的爪型转子对2B 是相反的,隔板上没有了气体通道,第三级泵体内转子以及气道和第一级泵体内结构相同,第四级和第二级结构相同,级间交错分布。我们称这样的结构为“反爪型干式真空泵”。可是此结构不能保证第一级在排气时第二级正好吸气,在第一级排气结束时第二级吸气也结束,就通过在隔板上加工台阶的气体通道来实现,为了保证不影响气体的流量,隔板的厚度比较厚。
从上世纪80 年代末期英国某公司生产过这样的泵以后,目前在中国均得到了采用,四级泵设计完成后基本如下图所示意结构。
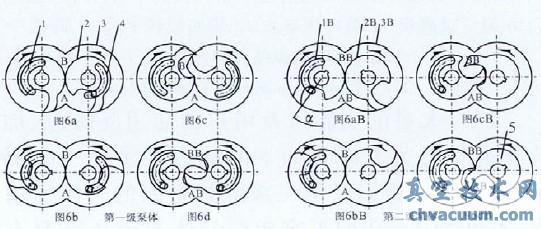
图6 反爪型结构原理图
如图7 所示,气体从进气口通过转子对3 以及泵腔2,压缩通过隔板4 上的一级泵体排气口(同时就是二级泵体进气口) 进入第二级泵体6内。依次类推,气体沿箭头方向,几乎比螺旋原理短一倍的距离,依次通过第三级泵腔9 第四级泵腔11,再通过排气口排出泵外。
和螺旋原理比较,从加工成本和制造方面有如下的缺点:①隔板依然较厚,整泵太长。②转子成反爪布置,动平衡精度要求更高;③整泵的长度依然较长,重量较重;④ 由于通过隔板来调节吸排气,上一级排气口就是下一级的进气口,工作过程中气体流导过小将会出现返流现象,对设备抽速造成一定的影响。
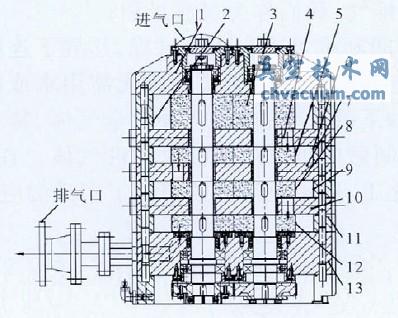
图7 四级泵结构示意图
2、一种新型的多级爪泵(螺旋反爪泵)工作原理

图8 螺旋反爪型结构的三维示意图
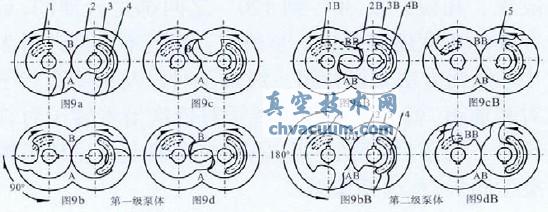
图9 螺旋反爪型结构原理图
从图9 可以看出,第一级的转子为正爪,第二级转子为反爪,为了保证第一级排气时第二级吸气,同时第一级排气结束时,第二级吸气结束,第二级转子对与第一级转子有个相位差为a 度,可以防气体形成返流现象。后面的转子对也依次正反交错排列,并依然各自保持相位差为a 度,我们称此种原理为“螺旋反爪原理”。这样一来,在隔板上的气体通道不需要台阶通道来保证气体的通排吸气的相位差了,通过设计四级泵就演变成了如下结构,下图为完全采用的参考图。图10 中可以看出,隔板已经可以做到非常薄,从理论上可以无限薄,从实践考虑到加工和弹性变形的影响,依然留有一定的厚度。整台泵体积变小,整机的重量可以大幅度降低。
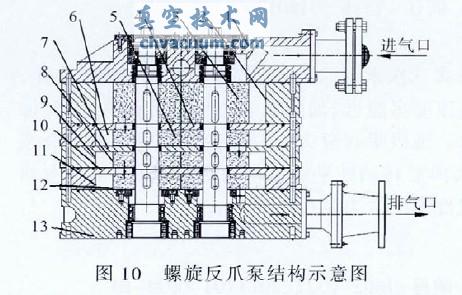
图10 螺旋反爪泵结构示意图
因此在制造方面有如下的优点:①体积小。由于各级的厚度可以优化设计,比变节距螺杆干泵的长度更短,主轴等相应的变短,可以大幅度的节省材料,降低加工成本和制作精度要求,降低运输成本,提高组装效率;②由于变节距设计,长期工作能耗更低;内部气体通道流导大于泵的设计抽速,在大气压下能耗也没有突然增长。
3、几种原理的实际性能测试比较
真空泵最重要的性能有极限真空、抽气速率和能耗。由于结构形式相似,极限真空度可以通过不同的加工精度实现,因此抽速曲线和能耗曲线决定了泵的性能优越程度:
(1) 几种原理泵型的实际抽速比较(LH-150PHC 为例)
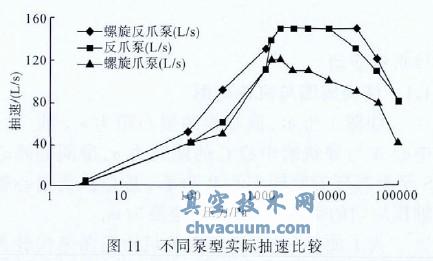
图11 不同泵型实际抽速比较
如图11 所示, 三种原理的泵在入口压力1000 Pa 以内的区间,抽速并没有明显的差别;在入口压力1000 Pa~2000 Pa 之间,螺旋原理的干泵实际抽速为反爪原理和螺旋反爪原理的80%左右;而当入口压力超过2000 Pa 时,螺旋原理爪泵的实际抽速大幅度降低,出现明显的抽气拐点;而反爪原理在入口压力10000 Pa 以上才开始衰减,而螺旋反爪泵是在入口压力25000 Pa 才开始衰减。由此可见:螺旋反爪原理在三种具体原理中抽气效率是最优越的。
(2) 几种原理泵型的实际能耗比较(以LH-150PHC 为例)
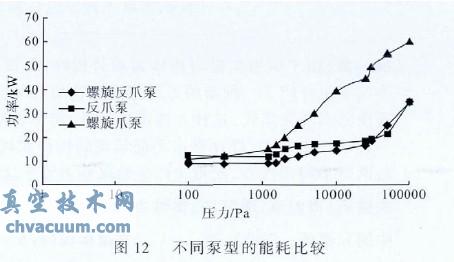
图12 不同泵型的能耗比较
如图12 所示,当入口压力在2000 Pa 以上后,螺旋爪泵的能耗就大幅度上升,达到满载功率的3 到4 倍;而螺旋反爪原理和反爪泵不存在电流大幅度上升的情况。由于螺旋爪泵存在内部过压缩情况,可以说明转子之间的相位角度以及整个泵的设计是存在缺陷和不足的。
4、结论
通过以上三种结构方式的比较,可以得出如下结论:爪型干式真空泵最经典的结构有螺旋型、反爪型和螺旋反爪型三种结构,其中螺旋反爪型结构可以大幅度缩短泵的长度、节约大量的材料、提高抽气效率、降低加工精度、提高抽气性能等,对爪型干式真空泵的发展和普及将带来巨大的推动作用。
参考文献
[1] 达道安.真空设计手册.3 版[M].北京:国防工业出版社,2006.
[2] 徐成海.真空工程技术.1 版[M].北京:化学工业出版社,2006.
[3] 张以忱.真空工艺与实验技术.1 版[M].北京:冶金工业出版社,2006.
[4] 杨乃恒,巴德纯.真空获得设备[M].北京:冶金工业出版社,2001.
[5] G.C 科尔(作者)张衍(译者).制药生产设备应用与车间设计.2 版[M].北京:化学工业出版社,2008.
[6] 李瑞玲,徐曦.螺旋反爪型干式真空泵[P].中国专利:ZL 2009 1 0157920.3,2009.12.23.
[7] 马容,李端玲. 爪型干式真空泵转子[P]. 中国专利:200710097890.2,2007.09.12.
[8] 王志,巴德纯.爪型泵转子理论型线计算机模拟研究[J].沈阳航空工业学院学报,2002,19(1).
[9] 姚民生,等.爪型泵型线的研究[J].真空,1989,(3).