基于新型植树挖坑机的Pro/E仿真
基于保护环境的原则,针对传统挖坑机的缺点,研发了一种挖坑质量高、速度快、安全可靠、劳动强度低、挖坑成本低且能适应不同坑深要求、地形变化和土壤硬度等条件的新型挖坑机。介绍了新型挖坑机的工作原理,并运用三维软件Pro / E 进行了运行学分析,真实再现了挖坑机的工况。结果表明,新型植树挖坑机能够满足工作要求。
引言
目前,国内外挖坑机基本上采用挖头为螺旋式、提升机构为三点式、动力为拖拉机挂靠式的结构。其特点是整体结构简单,但刀具复杂不可更换,同时挖头产生不断变化的侧压力,导致拖拉机的摇晃和振动,阻力增大,工作稳定性差,使用范围也受到很大限制。针对传统挖坑机的缺点,本文研发了一种具有挖坑质量高、速度快、安全可靠、劳动强度低、挖坑成本低且能适应不同坑深要求、地形变化和土壤硬度等条件的新型挖坑机。本新型挖坑机以发动机为动力,代替了传统拖拉机,从而降低了制作成本,并将原来的立体式刀盘改为平面式刀盘,减少了整机的占用空间。目前,传统挖坑机的研发大部分都是通过类比或经验得出各个零件的尺寸,具有一定的盲目性和局限性。因此,需要引进更为先进、合理的设计方法,为以后挖坑机的生产和制造提供更加有效的参考。
本文采用三维仿真软件Pro /E 建立了挖坑机的三维实体模型,真实再现了挖坑机的工作状况,对挖坑机进行了运动学分析和三维仿真。此方法对提高挖坑机的寿命、加工精度和降低成本具有重要的指导意义。
1、新型挖坑机的工作原理
新型挖坑机由动力机构、传动机构、进给机构、行走机构、组合式刀盘机构和机架等部分组成,如图1和图2 所示。
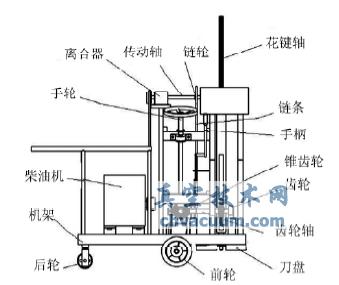
图1 新型挖坑机正视图
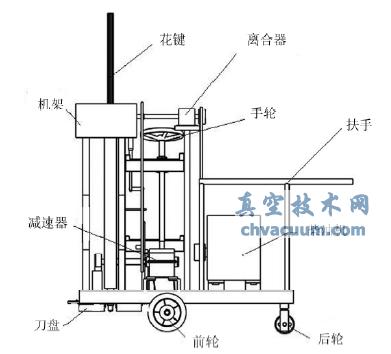
图2 新型挖坑机后视图
1.1、动力传输
动力选用独立的柴油机。柴油机与离合器通过皮带轮连接,花键轴带动组合式刀盘机构转动,完成挖坑作业。减速器的输出轴通过联轴器与花键轴相连,带动花键轴转动,进而带动花键连接套转动。右边是一个可以转动但不能轴向窜动的可同花键连接套配合的锥齿轮。通过手柄绕固定支点转动和限位装置通过拨叉将花键连接套固定在3 个不同的位置上,来实现不同的进给方式和行走方式。
1.2、刀盘进给机构
刀盘进给机构分手动进给机构和自动进给机构两种方式: 手动进给机构的手轮通过驱动杆与一组锥齿轮的一个齿轮连接,经齿轮轴连接齿轮,通过齿轮齿条带动套筒完成纵向进给运动; 自动进给由传动轴上的链轮带动减速器,通过减速器的减速与换向将动力传给齿轮轴上的齿轮,进而驱动齿条实现刀盘的进给运动。
1.3、行走机构
新型挖坑机的行走运动可分为自动行走和人工推动行走两种方式: 手动行走通过人力推动,将力传给后轮和前轮,使其行走; 自动行走运动可通过手柄绕固定支点转动和限位装置( 拨叉) 将花键连接套与链轮配合,由传动轴上的链轮带动减速器,通过减速器的减速与换向将动力提供给另一链轮,带动后轮和前轮做行走运动。
1.4、组合式刀盘机构
组合式刀盘由缺口圆盘、定位钻头、主刀片和排土叶片组成,如图3 所示。定位钻头固定在圆盘中心,刀盘正面分布有两把主刀,刀盘背面分布有排土叶片。机架用于固定并支撑动力机构和传动机构。
5、结论
1) 三维仿真软件Pro /E 真实再现了新型植树挖坑机的工作工况。
2) 新型植树挖坑机能够满足工作要求。