粒子追踪测速(PTV)技术及其在多相流测试中的应用
粒子追踪测速即PTV方法是近年来受到较多关注的一种多相流全场测试技术。本文通过文献综述总结了该方法的最新进展,涵盖了其试验装置构成、多相流图像数据的处理、粒子匹配算法的分类及特点等专题内容,着重对粒子匹配进行了讨论。最后结合工程应用实例分析了使用该方法时应注意的问题。
1、前言
多相流动是自然界及工业生产(特别是过程工业)中最普遍的现象之一。研究多相体系中各相的运动及其作用规律兼具理论及现实意义,各种测试方法层出不穷,粒子追踪测速方法(PTV)就是其中颇具特色的一种。该方法就是通过追踪单个粒子的运动轨迹计算其速度,属于Lagrange类方法,因此能够实现较高的空间精度,近年来在流动测试领域得到了广泛的应用。
2、粒子追踪测速方法
粒子追踪测速可通过2种方式实现:分析顺序采集的、曝光时间较短的多帧图像数据,匹配同一物理粒子计算其位移(速度),或计算较曝光时间下的粒子光学轨迹长度。尽管后者成本低、实时性强、操作简便,但其精度和处理复杂流动的能力尚未得到认可,目前研究实践中前者仍占绝对主流,本文围绕这一类PTV技术展开。此处的“粒子”既可以是连续相的示踪剂、也可以是分散相,一些具体处理上的差别将在后文介绍。
2.1、数据采集
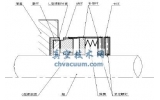
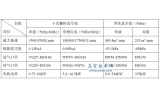
PTV测速的硬件系统由流体通道、示踪剂或分散相注入设备、光源、图像采集设备、通信设备等构成。流体通道即研究的流场,一些典型的例子包括风洞、水槽等;满足一定要求的微小固体颗粒、液滴及气泡均可作为连续相的示踪剂,将其注入流场之中一般需要专门的设备。当然,由于PTV方法最终处理的对象是数字图像,因此光源及图像采集设备是硬件系统的核心。光源的种类包括激光、卤素灯光、LED灯光及X射线等,其中以激光较为常用,可分为连续和脉冲形式;为了对光源产生的光进行处理,使之满足波长、方位及形状的要求,PTV测试系统中还常安装滤镜、反射镜和透镜等光学元件。图像采集设备主要是CCD和CMOS型的各种数字相机,近年为满足高速流动测试的要求,帧率较高的高速数字照相机的应用不断增加。
PTV测速可在2D平面或3D空间内进行,前者只需要一台相机,采集图像时相机光学主轴垂直于平面光源;后者能够对流场进行更精细的刻画,但在硬件配置和数据处理方面要求更高。3DPTV的硬件架构包括2相机系统、3相机系统、4相机系统和1相机-多反射镜系统等。有研究者指出,只有采用3台或更多的相机才能有效地避免同步图像粒子空间匹配的模糊性。单相机-多反射镜系统基本可实现多相机系统的功能,然而减少了硬件费用、省却了数据同步,值得进一步探索与发展。
Kraizer等提出了一种实时PTV技术,与传统方法不同,该技术中数字相机利用现场可编程门阵列(FieldProgrammableGateArray,FPGA)将图像数据进行前处理,仅将处理后的“粒子”特征信息而非图像数据通过网卡在线传递给电脑进行后续计算,避免了繁重的传输任务,降低了硬件的要求、提高了处理速度,适合与远程控制和宽带网络结合使用。
2.2、数据处理
2.2.1、前处理
(1)图像离散噪声去除
关于数字图像噪声的去除技术已经较为成熟,主要可通过高通滤波或减去背景等方式实现,此处不与赘述。
(2)粒子特征信息的提取
PTV测速是针对单个粒子进行的,因此需要尽可能保留测试粒子的主要特征信息,包括中心坐标、尺寸、亮度、颜色、亮度动量等。在提取特征参数之前,首先要进行粒子的识别及分割,最简单的办法是单阈值法,鉴于单阈值法在处理包含重叠粒子和非均匀光照的图像方面具有比较明显的局限性,研究者们又提出了多阈值法及动态阈值法等,在一定程度上改进了分割效果。数字掩模法是另一种较为常用的方法,主要用于均匀、尺寸已知的粒子图像的识别分割。此外,侵蚀/膨胀方法是近来较受关注的一种方法,Cardwell通过处理实例证明了该法鲁棒性较强,能够可靠地分割复杂的粒子图像。获取粒子的形心坐标和尺寸的简易方法是通过像素计数法得到粒子的尺寸,再通过计算其亮度重心得到形心坐标。Adrian和Yao指出,对于满足衍射约束、尺寸约为10μm的球形粒子图像,其亮度近似符合二维高斯分布。在这个结论的基础上,研究者提出了一系列方法确定粒子的形心和尺寸,包括三点拟合法和最小二乘拟合法、四点拟合法及积分拟合方法,计算精度不断提高。
2.2.2、粒子匹配
即确定前后帧图像中的同一物理粒子(称为时间匹配),或确定3D装置多个同步图像中的同一物理粒子(称为空间匹配或三维重构),这一环节是PTV方法的核心,因此相应方法一直是学界关注的重点。对于时间匹配,算法中利用的粒子特征信息越多,准确匹配的可能性越大;然而,鉴于多特征信息匹配计算工作量偏大,目前多数算法仍主要通过位置信息进行粒子匹配,根据实施方式可大致分为3种:
(1)相关类算法
其原理与粒子图像测速(PIV)的相关算法相似,区别在于PTV关联的窗口以单个粒子、而非规则分布的节点为中心划定。另外,在进行相关计算前常需对图像进行二值化处理,因此又称为二值图像关联方法BICC。
(2)基于临近运动的经验算法
这一类算法是目前流体测试应用中的主流,依据的经验准则主要包括:最大速度约束、速度连续变化、邻近区域运动相似、匹配一致等。其早期典型代表是所谓的四帧算法,实施较为复杂,且无法处理两帧PTV的图像数据,为此Baek和Lee等引入了松弛算法,并迅速在PTV测试领域得到推广,其主要步骤如下:
1)针对前一帧图像中的粒子i,根据最大位移阈值Rm确定可能与其匹配的后一帧图像中的候选粒子集Sm,同时根据另一距离阈值Rn确定前一帧图像中与粒子i邻近、发生相似运动的参选粒子集Sn;
2)考虑粒子无匹配的可能性,根据概率归一化原理初始化粒子i与候选粒子集Sm中的元素j匹配的概率Pij;
3)当粒子i与j匹配时对应位移矢量Rij,假设粒子k为i的参选粒子集中的一个元素,则当k与后一帧图像中的粒子l匹配对应的位移矢量Rkl与Rij之差的模小于阈值Rp时,则认为后一匹配的存在强化了前一匹配成立的可能,由一个迭代关系式给出Pkl对Pij的影响;
4)设置匹配概率阈值Pt,当Pij>Pt时,认为该匹配成立,Pij不再变化,如此经过多次迭代得到前一帧及后一帧图像中粒子的完全匹配情况。
3、应用举例
3.1、风沙输运
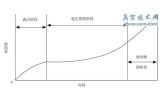
风沙输运是日益严重的沙漠化问题中的关键物理现象。鉴于该现象十分复杂、很难通过理论方法准确描述,采用不同手段、包括PTV方法进行的试验研究备受重视。其中以高速照相机或摄像机和连续光源进行的连续时间PTV测量主要用于沙粒跃移及爬流运动规律、特别是沙粒间及沙粒与反射表面间作用的研究;而以普通CCD/CMOS数字照相机和脉冲光源进行的沙粒速度的两帧PTV测量,可方便地与空气相的速度测试手段(如皮托管、PIV等)结合,获得两相的运动信息,对分析相间的双向耦合作用很有帮助。风沙输运的PTV测量一般在竖直平面内进行,尽管有学者指出沙粒严格上属于三维运动;另一个值得注意的问题是跃移底层的沙粒分布密度非常大,相互之间的碰撞频繁、运动不规律,导致这个区域“粒子”(即沙粒)的匹配较为困难。
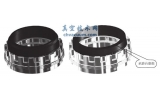
3.2、气泡流动
含气泡的多相流动在化学及环境工程中较为常见,在强化传热和流动减阻等多种场合都有应用。尽管气泡和沙粒同属分散相,但前者一般尺寸较大、透明、存在变形和重叠、运动速度较慢,因此其PTV测速的实施细节与后者差别明显。通常的处理步骤是去除图像噪声后,确定气泡的轮廓、对图像进行二值化,计算各气泡的几何中心,最后进行相应“粒子”的匹配。由于气泡尺寸大、速度慢,正确匹配难度不大;但是之前的图像处理过程相比沙粒复杂,另气泡变形会在测速结果中引入误差,这些在实践中都需要注意的。
4、结语
粒子追踪测速(PTV)是一种应用广泛的新兴多相流测试技术,其精度与数据采集、处理的多个环节有关,在实践中应结合测试对象特征确定具体实施步骤和方法。