比例电磁阀开环-闭环复合控制算法
以比例电磁阀为研究对象,以快速建立具有良好性能的通用控制算法为目标,以充分利用电磁阀的响应特性为途径,提出了将开环控制和闭环控制相结合的开环-闭环复合控制算法,论述了控制算法的模型结构和设计过程。不同于将误差作为唯一输入的常规控制算法,复合控制算法同时将目标值和误差作为控制器的输入。以电磁阀响应特性实验为基础,根据电磁阀的稳态特性建立开环控制表,消除系统的稳态非线性;根据电磁阀的瞬态特性设计闭环控制器和滞后特性预估修正模块,降低模型误差和滞后特性的影响,提高动态响应性能。实验结果验证了复合控制算法的控制精度、响应速度和鲁棒性。
在施肥、灌溉、喷药、驱动、变速器等设备中广泛应用比例电磁阀对压力或流量进行控制。由于比例阀在主要工作区间内具有良好的线性,当控制性能要求不高时,采用简单的PID 控制算法即能基本满足要求。随着精准农业对控制精度、动态性能、全工况调节性能和稳定性的要求逐渐提高,则需要设计性能更加优越的控制器。
提高控制性能的措施主要包括优化电磁阀结构和改进控制算法两个方面。在控制算法方面,真空技术网(http://www.chvacuum.com/)之前也发布的很多文章中针对具体应用场合设计了不同的控制算法。为了在提高控制算法性能的同时,促进控制算法的模块化和通用化,本文提出一种针对比例电磁阀控制算法的设计流程,按照该流程即可获得具有良好控制性能的控制算法,以某反比例溢流阀为例,论述控制算法的设计过程和控制效果。
1、电磁阀特性实验与建模
1.1、电磁阀特性实验
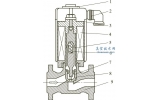
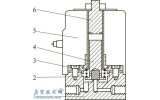
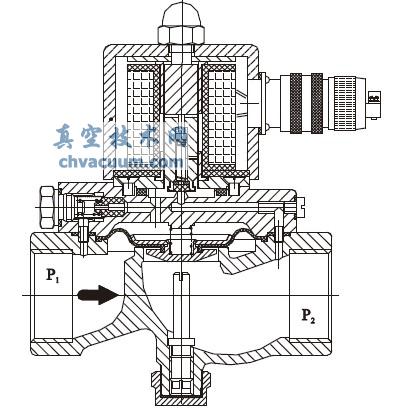
以某反比例溢流阀作为控制对象,油泵由发动机驱动,通过调节占空比控制液压缸的压力。电磁阀特性实验包括稳态特性实验和瞬态特性实验。稳态压力主要影响因素为占空比和油泵转速,部分实验结果如图1a 所示。稳态压力在主要压力范围内线性度良好,具有明显的饱和特性和回滞特性。占空比一定时,油泵转速越高,压力越大,当转速超过3000r/min时,其对压力的影响已不明显。将相互对应的两条回滞曲线进行平均,并做平滑处理,得到平均稳态压力特性,如图1b 所示。
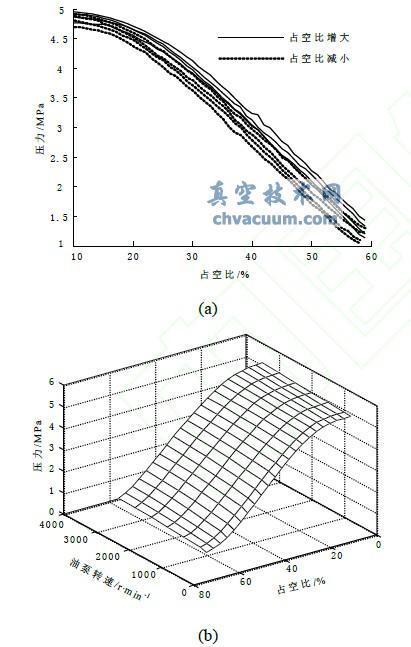
图1 电磁阀稳态特性实验
(a)部分稳态压力实验结果 (b)平均稳态压力特性图
瞬态特性实验是测试不同转速下占空比阶跃变化时的压力响应过程,包括阶跃上升和阶跃下降两个过程,结果如图2 所示。可以看出,瞬态压力变化过程有3 个特点:
①压力的响应延迟时间约为0.03s,并且与转速无关。
②响应过程中存在压力波动,可近似为二阶系统。
③不同转速下的压力上升过程略有差别,转速越高,响应速度越快,但不同转速下的压力下降过程则基本重合。
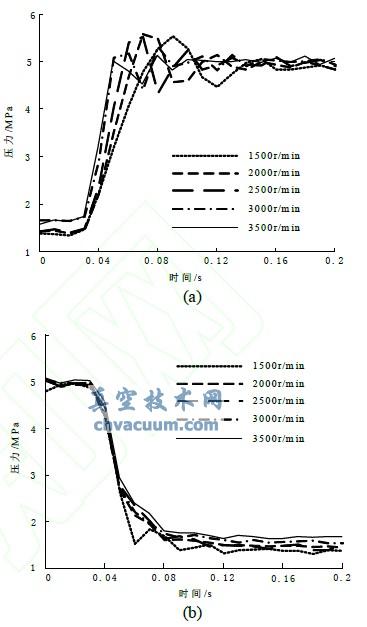
图2 电磁阀瞬态特性实验
(a)阶跃上升 (b)阶跃下降
4、结论
(1) 对比例电磁阀的稳态和瞬态响应特性进行实验,将电磁阀的响应特性分为稳态饱和特性、二阶动态响应特性和滞后特性,建立电磁阀的简化传递函数模型。
(2) 结合以目标值为输入的开环控制和以误差为输入的闭环控制,形成开环-闭环复合控制,可更有效地利用系统信息。根据稳态特性建立开环控制表,闭环控制器根据误差对控制量或控制目标进行修正,不同于以误差作为唯一输入的常规控制方法,复合控制同时将目标值和误差作为控制器的输入。
(3) 将复合控制算法应用于电磁阀压力控制,根据电磁阀的3 个特性分别设计了开环控制表、闭环控制器和滞后特性预估修正模块,制定了控制算法的设计流程。实验和应用结果验证了开环-闭环复合控制算法的控制精度、响应速度和鲁棒性。