基于三维CAD模型的复杂机械设备拆装智能诱导系统
为实现复杂机械设备三维设计与拆卸、装配三维诱导的一体化,提出了基于三维CAD模型的复杂机械设备增强现实拆装诱导框架,基于该框架提出了基于拆装优先关系分层网络模型的拆装顺序诱导方法,该方法在初始化阶段自动生成树状拆装优先关系分层网络模型,在设备拆装过程中根据操作者的拆装操作在线规划拆装顺序,智能输送相关诱导信息。提出了基于透视投影原理的三维诱导场景生成与显示方法,能够根据拆装方向和零部件包围盒的尺寸,利用透视投影原理将虚拟诱导场景定位在世界坐标系中,使虚拟诱导场景以合适的视角显示在屏幕的指定位置上,提高了三维信息显示的直观性。最后建立了原型系统,验证了以上理论和方法的可行性。
引言
随着技术的发展,现代大型复杂机械装备(如各种发动机)的拆卸、装配工艺日趋复杂,操作人员单纯依靠自身经验、技术和知识难以高效地完成复杂机械装备的拆卸、维修和装配。纸质和电子技术手册当前被广泛用于存储、查询拆装维修工艺和技术信息,但使用过程中操作者需边操作设备边手动查看手册,操作难度大且效率低,并且注意力需要在手册和设备之间频繁切换,易受周围环境影响,从而造成拆装维修差错等问题,因此迫切需要一种新的方式,以主动向操作者输送所需信息,诱导其完成当前的拆装维修操作。
增强现实技术是在虚拟现实技术的基础上发展起来的,它能够将计算机生成的虚拟信息叠加显示在真实场景上,使用户看到一个虚实融合的环境。增强现实技术在机械设备拆装维修诱导中具有广泛的应用前景,引起了国内外的重视,已经开展的研究包括STARMATE(system using augmented realityfor maintenance,assembly,training and education)系统、芬兰国家技术研究中心(简称VTT)系统、ARMAR(augmented relity for maintenance and repair)系统和MOON(assembly oriented authoringaugmented reality)系统等,空客军用飞机公司已经将增强现实技术应用于A400M 军用运输机布线诱导中;Webel等也已将增强现实技术应用到产品装配技能培训中。近些年国内也开展了增强现实装配相关的研究,如宋荆洲等将层次着色Petri网与图灵机模型结合,提出了一种增强现实装配环境系统模型,较好地满足了增强现实装配系统的动态实时响应要求;王峻峰等研究了增强现实环境下的产品装配引导技术;赵敏等构建了一套装配维修训练的增强现实系统,在人机交互过程中采用静态标志和动态标志相结合的方法,通过人手控制动态标志来触发感兴趣的内容,完成维修操作。但现有的基于增强现实技术的拆装维修系统多是“以计算机为中心”的程序化引导系统,普适能力差,仅实现了虚拟信息和真实场景的增强现实叠加,尚未达到诱导的层次,如使用中操作者需要自己识别拆装任务,并通过手动操作计算机设备或语音识别的方式从数据库中搜索提前规划好的信息,这样不仅不适用于噪杂的环境,而且分散了操作者的注意力,普适性能差。当前三维计算机辅助设计(Computer Aided Design,CAD)软件已在产品设计中得到推广和应用,如果能够利用增强现实技术将复杂机械设备的三维CAD模型应用于该设备的拆装维修诱导和培训中,实现三维设计与拆卸、装配三维诱导的一体化,必将大幅度提高产品的附加值,在军事装备(如飞机、舰船、装甲等)维修培训和战时抢修领域具有广泛的应用前景。
鉴于此,本文使用增强现实技术,提出基于三维CAD模型的复杂机械设备增强现实拆装诱导框架,通过无线射频识别(Radio Frequency Identification,RFID)和位置跟踪设备识别操作者的拆卸或装配进程;根据产品的三维CAD装配模型生成拆装优先关系分层网络模型,建立基于拆装优先关系分层网络模型的拆装顺序诱导方法,从而根据当前的拆装进程、拆装工艺和操作者的拆装历史在线向操作者推荐下一步将要拆装的零部件,实现拆装顺序和拆装工艺的智能输送。提出基于透视投影原理的三维诱导场景生成与显示方法,该方法根据拆装方向和零部件的包围盒尺寸,利用透视投影原理将虚拟诱导场景定位在世界坐标系中,从而将虚拟诱导场景以合适的视角显示在屏幕的指定位置上。
1、复杂机械设备拆装诱导系统框架
在合适的时刻自动、准确地输送操作者急需的诱导信息,是实现“以人为中心”的拆装诱导的关键之一,因此拆装诱导信息的推送需要综合考虑产品当前的拆装进程、拆装工艺和操作者的个体拆装需求等,为此本文提出了如图1所示的复杂机械设备拆装诱导框架。
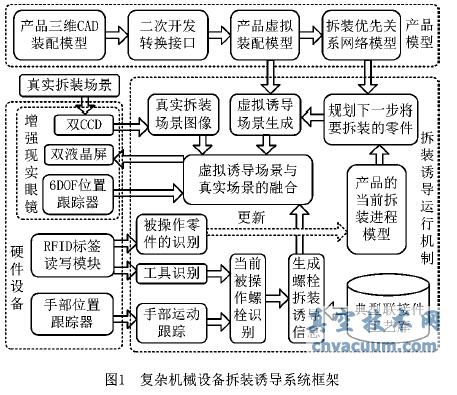
该系统的硬件包括戴在操作者眼睛前方的增强现实眼镜、戴在操作者手部的RFID读写设备、手部位置跟踪设备,以及贴在零件和拆装工具上的RFID标签。该诱导框架以产品三维CAD装配模型为基础,通过对CAD系统的二次开发将产品的CAD模型转化为虚拟装配模型,在诱导系统初始化阶段加载虚拟装配模型,生成树状拆装优先关系分层网络模型。通过RFID标签读写设备和手部位置跟踪器识别操作者正在进行的拆装操作,并自动生成相应的拆装诱导工艺;拆装操作完成后更新产品的拆装进程模型,以表达产品的当前拆装状态。系统可以根据产品的拆装优先关系模型和当前的拆装进程模型,在显示屏幕指定区域上以三维图形、动画和文字的形式,向操作者提示下一步要拆装的零件及其拆装工艺等。
2、结束语
本文基于增强现实技术,研究了基于三维CAD模型的机械设备拆装诱导系统,给出了诱导系统框架,提出了基于拆装优先关系分层网络模型的拆装顺序诱导方法和基于透视投影原理的三维诱导场景的生成与显示方法,并通过原型系统验证了其可行性。本研究提出的理论和方法不仅实现了机械产品三维CAD软件设计与拆卸、装配诱导的一体化,而且具有较好的普适性,因此在大型机械设备维修培训、训练和军事装备的抢修等领域具有广泛的应用前景和应用价值。
本文设计的系统只是一个原型系统,距离实际应用尚有一定的距离,三维空间定位、零件识别、增强现实眼镜的应用尚不成熟,人机交互性有待于进一步改进。未来可以采用一些硬件设备提高系统的人机交互性,如原型系统中手部位置跟踪部分和增强现实跟踪部分可以使用超声波设备、GPS跟踪设备等代替;增强现实眼镜可以采用无线通信的方式与计算机通信;另外如果能够将高精度位置跟踪模块和RFID模块集成,设计一个具有物体识别和位置感知的无线模块,则必将大幅度提高诱导系统的可操作性和手部位置跟踪的稳定性,这些都是未来需要研究的方向。