LCD中几种运动估计块匹配算法比较(2)
菱形算法(DS)( 图3(e)):搜索模式首先分大搜索模式(LDSP)和小搜索模块(SDSP)。
第一步,用LDSP 在搜索区域中心及周围八个点处进行匹配计算,如果价值函数最小点位于中心点,则进行第三步;否则到第二步。第二步,以上一次找到的价值函数最小点作为中心点,用新的LDSP 来计算,如果价值函数最小点位于中心点,则进行第三步;否则重复第二步。第三步,以上一次找到的价值函数最小点作为中心点,将LDSP 换为SDSP,在五个点处计算,找出价值函数最小点,该点为区域中价值函数最小点。应用初步定位和精确地位相结合的方法,提高了搜索的效率。
适应性十字搜索法(ARPS)(图3(f)):一个宏块与其周围宏块具有相同运动矢量的可能性很大,利用这一可能性,可以用已知宏块的运动矢量来预测当前宏块的运动矢量。
这是自适应性十字搜索法的第一步,以下步骤与菱形算法相同。这种算法超越菱形算法的方面在于如果运动矢量为(0,0),可以直接利用SDSP模式搜索,减小了计算量。
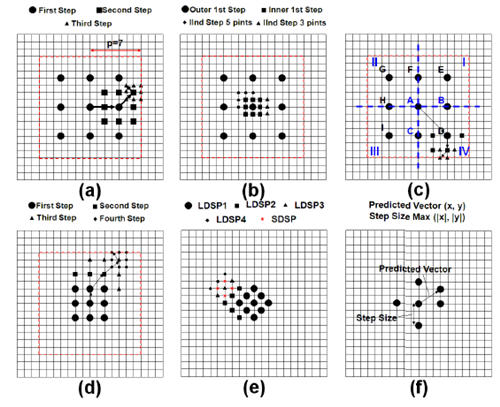
图4 几种块匹配算法
2、各种块匹配算法应用比较
运算量小、估计准确是所有运动估计方法追求的目标。对于基于像素的直接法来说,运算量表现为平均搜索次数。而估计的准确程度往往用补偿图像与原图像比较的峰值信噪比(PSNR)来表示。为了衡量准确程度,这里采用对视频序列的奇数帧进行运动估计,根据估计的运动矢量以及奇数帧图像得到补偿帧,将得到的补偿帧与原视频序列的偶数帧进行比较。
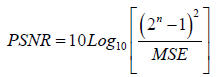 (3)
(3)
方程(3)是峰值信噪比(Peak Signal to Noise Ratio, PSNR),其中n 为灰度存储位数, MSE为均方误差,方程(1)。
计算量的大小和峰值信噪比的高低与宏块的大小、搜索区域的大小密切相关,此次模拟采用常用的参量,宏块大小为16×16 像素,搜索区域以宏块为中心向四周扩展7个像素。如图5。
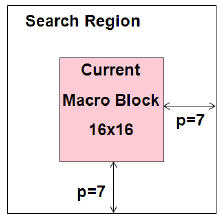
图5 宏块和搜索区域定义
Fig.5 Macro Block and Search Region
图6 是利用1.2 节介绍的七种方法对经典视频“foreman”进行运动估计和运动补偿,在计算量和所得补偿帧与原有偶数帧峰值信噪比方面进行了比较。全搜索法计算量固定不变,为204 点每个宏块,所以在计算量比较图中没有列出。
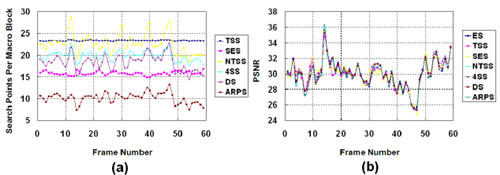
图 6 几种块匹配方法的比较 (a)计算量(b)峰值信噪比
3、结论
七种块匹配算法所得补偿图像与原有图像的峰值信噪比都比较接近,总体水平都在24以上,得到了比较好的效果,但其受图像内容的影响比较大,对图像内容的依赖性比较强。
尽管如此,七种方法在计算量上的差异却非常明显,全搜索法的计算量固定不变,为204点每个宏块,在此基础上发展起来的快速算法大大降低了计算量,计算量平均都小于25 点每个宏块,其中适应性十字搜索法计算量最小,仅为平均10 点每个宏块。简单高效搜索法的计算量优越性仅次于适应性十字搜索法,但其稳定性比较好,对图像内容的依赖性不大。
三步法虽然在几种快速算法中计算量最大,但它是最稳定的算法。其它三种算法的计算量介于三步法和简单高效算法,它们对图像内容的依赖性都比较强。适应性十字搜索法在具有较高的峰值信噪比的基础上,计算量最小,具有绝对的优越性。