基于VB 6.0和UG 6.0的盘形凸轮机构CAD系统设计
利用面向用户的可视化软件Visual Basic 6.0和UG 6.0进行盘形凸轮机构CAD系统设计。输入原始参数后,得到该参数下的凸轮廓线、机构运动分析及运动仿真,大大缩短解析法设计凸轮廓线时数据处理时间,为高速高精度凸轮机构的设计、制造和检测提供了有利条件。使凸轮机构的设计直观化、实时化。通过实例验证,该软件界面友好,方便直观,既可用于工程实际,又可满足教学需要。
1、引言
随着社会发展和科技进步,对各种机械的效率、精度、自动化程度要求越来越严格。为适应这种发展形势,作为自动机械常用部件的凸轮机构必须具有特性优良的凸轮曲线和高速、高精度性能。随着凸轮CAD/CAM软件技术的发展和数控技术的日益普及,为高速高精度凸轮机构的设计、制造和检测提供了有利条件。笔者采用Visual Basic6.0和UG6.0将设计界面可视化,完成凸轮机构的繁杂计算、图形绘制、机构运动分析、编制数控加工程序等功能。
2、数学模型建立
以直动平底从动件盘形凸轮机构的设计为例,进行设计分析描述。图1为直动平底从动件盘形凸轮。已知基圆半径R0、偏距e和从动件运动规律s=s(φ)。选取直角坐标系原点与凸轮回转中心O重合,y轴与从动件推程方向一致。
机构运动开始时推杆平底与凸轮轮廓线切与起始点B0。根据“反转法”原理,从动件随导路反转φ角后产生位移s,凸轮与从动件平底的接触点到达B点。此过程可以看作从动件平底与凸轮轮廓线接触点B0点绕O点反转φ角,到达基圆上B'点,再沿导路方向移动到B″点,然后再沿平底方向移动到B点,可用下述坐标旋转和平移变换来描述B点和B0点之间的关系:
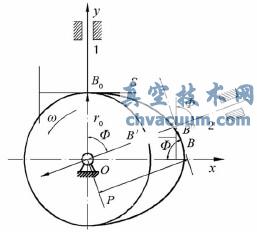
图1 直动平底从动件盘形凸轮
1.凸轮机构运动初始位置 2.凸轮机构在反转法中转过Φ的位置
5、结论
(1)本设计运用VB6.0编程,软件可以生成可视化界面,动态输入凸轮设计参数,进行凸轮廓线设计、运动分析和运动仿真。得到的数据可存储,使结果运行可行性加强,为在以后的加工或生产提供有效的数据参数和设计思路。
(2)利用UG进行运动仿真,输入和输出的信息在图形区域显示出来,不仅可以直观考察凸轮机构是否满足设计要求,而且可在界面上修改设计参数来满足设计要求。
(3)此软件具有参数优化功能。当动力结果不满足设计要求时,例如,当最大压力角αmax≥[α]时,系统会自动增大基圆半径,重新设计凸轮廓线和运动仿真。