HL-2A托卡马克装置上CXRS诊断系统中观测视线的研究
在HL-2A托卡马克装置上CXRS诊断系统的光谱诊断及其相关研究中,观测视线的确定至关重要。以CII为基准,利用MATLAB编程对中性束的实验数据进行拟合,根据多普勒频移的理论及相关计算确定观测视线与中性束源的夹角,进而通过空间几何的方法计算出该视线与中性束的交点,从而确定了观测视线。
由于核聚变装置的等离子体温度极高,使得其诊断手段受到极大的限制。在等离子体的诊断中,光谱诊断主要分为两大类:主动光谱诊断和被动光谱诊断。被动光谱诊断就是不向等离子体注入外来粒子,直接接受等离子体自身反应所发射出来的光谱。HL-2A托卡马克装置上的CXRS诊断系统,则采用主动光谱诊断的方法,利用注入的中性束与等离子体反应后的复合光谱来研究等离子内部的反应情况。在HL-2A托卡马克装置上CXRS诊断系统的光谱诊断及其相关研究中,很多地方都会涉及到观测视线,有些涉及到其方向向量,有些涉及到其方程,有些涉及到中性束与它的夹角以及中性束与其交点处的半径值。例如,在利用复合光谱背景光谱测量有效电荷数以及在编写一些拟合程序时都会涉及到观测视线。因此,CXRS诊断系统中观测视线的确定是至关重要的。本文以CII为基准对利用MATLAB编程中性束的实验数据进行拟合,根据多普勒频移的理论以及一些数学知识来确定出观测视线与中性束源的夹角,再通过空间几何的相关知识计算出视线与中性束的交点,这样就确定了观测视线。
1、HL-2A装置上CXRS诊断系统及物理模型
在HL-2A 装置上的CXRS诊断系统中,有四个中性束注入源,四个源的位置及注入方向如图1所示。
在图1(a)的(u,v,w)坐标系中,Q1、Q2、Q3、Q4分别表示一、二、三、四号源的注入中心直线上的点。Q1、Q2、Q3、Q4这四个点在一个平面上,点Q 是四个点的几何中心;点S12和点S34分别是和一、二号源和三、四号源中性束注入直线在真空室中的交点,点S1是他们的对称点;同样的,点S14和点S23分别是一、四号源和二、三号源中性束注入直线在真空室中的交点,S2是他们的对称点。同时,点Q,S1,S2在一条直线上,以上各点在(u,v,w)坐标系中的坐标如表1所示。
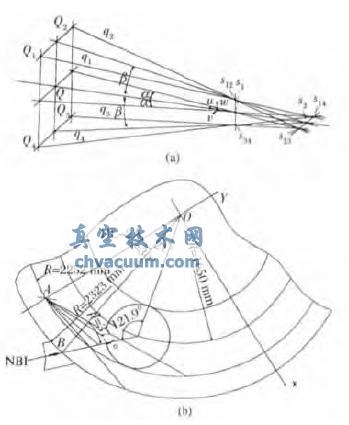
图1 四个中性束注入源,四个源的位置及注入方向
表1 四个源在(u,v,w)坐标系中的点的坐标

4、结论
由于前面已经得出了已知观测点A 的坐标,根据表4,4-14通道与一号源中性束交点的坐标也已经被确定,根据两点确定一条直线原理,便得到了这11个通道的11条观测视线。从上表的计算结果可以看出,4-14通道与中性束交点的坐标以及交点坐标处的环向半径值的变化是有规律的。从4-14道环向半径值依次减小,这与实际情况相符。






