基于CPLD的电动阀门驱动装置控制器设计(2)
换相综合单元:根据无刷直流电机的霍尔逻辑信号,产生无刷直流电机三相六状态120°的工作方式。
阀门运行状态识别单元:根据外部给定信号KF(开启阀门信号输入,上升沿脉冲有效)、GF(关闭阀门信号输入,上升沿脉冲有效)、KD(阀门开启到位信号输入,高电平有效)、GD(阀门关闭到位信号输入,高电平有效)和KS(阀门开启到位锁定信号输入,高电平有效)等辨识阀门的运行状态。
PWM信号输入处理单元:接收SG3525的两路PWM脉冲信号,并对两路信号进行处理,产生内部使用的PWM控制周期信号。MPWM1和MPWM2为电机M对应的PWM信号输入;NPWM1和NPWM2为电机N对应的PWM信号输入。
/MFLT,电机M系统存在故障时的故障信号输入,低电平有效。
/NFLT,电机N系统存在故障时的故障信号输入,低电平有效。
逆变器脉冲信号生成器:根据无刷直流电机的调制控制策略和阀门运行状态等,生成调制时的开关控制信号。HPWM_LON、HON_LPWM、PWM_ON、ON_PWM、HPWM_LPWM为五种无刷直流电机常用的PWM调制方式。HPWM_LON方式指上桥臂各功率器件在导通的120°进行PWM调制,下桥臂各功率器件在导通的120°保持恒通;HON_LPWM方式指下桥臂各功率器件在导通的120°进行PWM调制,上桥臂各功率器件在导通的120°保持恒通;PWM_ON方式指各功率器件在导通的前60°进行PWM调制,后60°保持恒通;ON_PWM方式指各功率器件在导通的前60°恒通,后60°进行PWM调制;HPWM_LPWM方式指上下桥臂各功率器件在导通的120°里同时进行PWM调制。本设计中采用调制方式。
MHA、MHB和MHC为电机M的转子位置信号,MT1、MT2、MT3、MT4、MT5、MT6为电机M对应逆变器的控制信号;NHA、NHB和NHC为电机N的转子位置信号,NT1、NT2、NT3、NT4、NT5、NT6为电机N对应逆变器的控制信号。
3、仿真分析
在MAX+PLUSÒ环境下进行了仿真,仿真波形如图4所示。
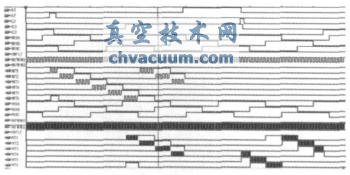
图4 仿真波形
由图可知,当开阀信号KF有效且各电机无故障时,电机M的驱动信号按MT1_MT2、MT2_MT3、,,MT5_MT6、MT6_MT1的顺序依次送出,并且按调制运行,所以电机M将在该驱动信号的作用下正向转动,实现开启阀门的动作。当阀门开启到位后,开启到位光电开关送出有效电平,即KD变为高电平,此时由图可见,电机M继续旋转,同时电机N也正向旋转,开始了阀门阀芯的锁定过程。当阀门开启锁定后,KS变为高电平,电机M和N同时停车,从而完成了开启阀门过程。
当关阀信号GF有效且各电机无故障时,电机M保持停车状态,电机N开始反向旋转,开始了阀门的关阀过程。电机N反向转动,释放阀门的锁定状态,阀芯在反力的作用下完成关阀动作。阀门关闭到位后,GD信号变为高电平,电机N停止反向旋转,完成阀门关闭过程。
上述仿真结果和动作原理完全一致,表明设计正确。在MAX+PLUSÒ环境下对器件下载程序,现场验证了阀门驱动器的功能。
4、结论
利用CPLD和SG3525设计了阀门动力装置的无刷直流电机控制器。使用MAX+PLUSÒ对CPLD所实现的控制功能和阀门状态进行了仿真,软件仿真和试验表明在阀门动力装置中采用CPLD作为逻辑处理单元,简化了系统结构、软件和硬件设计,提高了动力驱动系统的整体性能,并且降低了成本,提升了阀门的可靠性,通过扩展,可实现阀门的远程控制、防水击等功能,尤其适用于石油化工、油气储运等行业要求。