一种新型智能真空测量仪的研制(2)
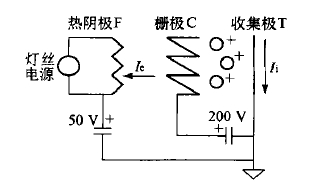
4、收集极电流与采样电路
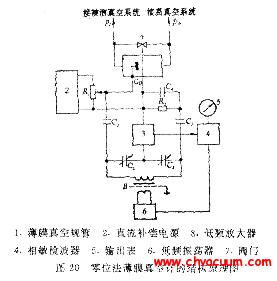
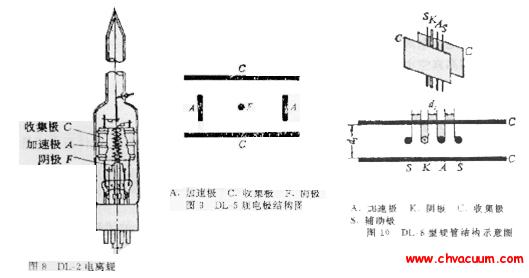
由公式(1) 可以计算传感器整个测量范围内输出的最大电流和最小电流。例如, 对于DL-5, k=0.015A/Pa, 取ie=50LA, 当P=10Pa, i+=7.5LA;当P=1024Pa时, 取ie= 500LA , i+=0.75nA , 由此知, 传感器输出电流的信号从数微安到几纳安在四个数量级范围内变化, 一般A öD 转换的信号必须是电压信号, 考虑到信号微弱, 即使最大的电流也仅微安级, 易被干扰信号淹没, 且又考虑传感器的灵敏度低, 使收集极的电压几乎近于零。因此必须适当增大转换电阻提高信噪比, 为此我们采用一个电流量级对应一个电阻, 有四个档使之都在毫伏级内变化, 然后选用合适的运算放大器进行放大, 我们这里采用仪器放大器。为了少占I/O, 采用2~4译码器, 具体电路如图3 所示。由于信号电流非常微弱, 不能用模拟开关, 我们采用机械式开关继电器, 不足之处是导通时缓慢。
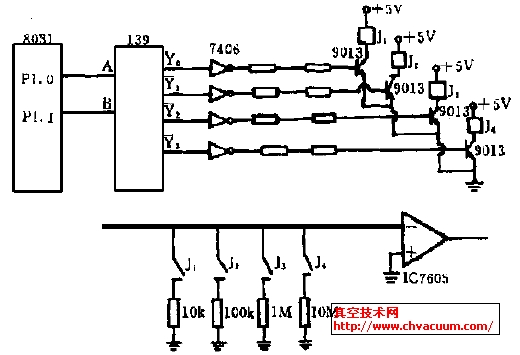
图3 收集极电流转换电路
5、软件
软件分为两大类, 一为执行软件, 测量发射电流, 控制导相角, 测量收集电流, 零位补偿, 计算压强和显示; 二是诊断软件, 自检、自校和预测, 只有测量正常, 才能保证测量的数据可靠。因此使用时先检查各部分是否正常, 检查EPROM , RAM , A/D转换器, 在测量中, 根据测量数据, 预测是否出现异常情况, 如超出量程, 灯丝断路等。若出现则及时切断电源, 显示出现故障信号, 并指示故障方位。主程序分为三部分: 第一部分开机, 判断冷、热启动, 冷启动初始化, 热启动时自诊自校。第二部分是执行功能子程序。第三部分是根据测量的信息, 判断是否出现异常现象。热启动若程序“跑飞”, 根据程序状态从那一步跑飞就从那一步恢复到那步执行功能。方框图如图4 所示。
6、误差
仪器误差主要包括: ①传感器的测量精度不高,一般在5%左右, 这是误差的主要来源。这是无法改变, 但可根据精度高的传感器进行校正。②传感器串入的干扰信号。可采用一些措施使之降低但不能完全净化。③灯丝奇异波带来的污染等。尽管这样, 我们已可准确测出2~3位有效数字。
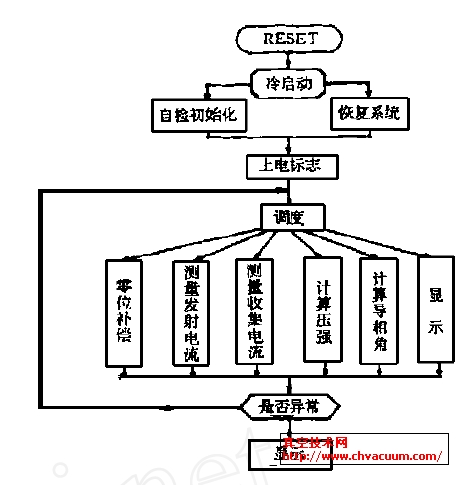
图4 程序流程图
7、结论
这种新型的真空测量仪样机的试制是顺利的,现已小批量生产。这表明本文所叙述的设计思想、方法和措施基本上是正确的、可行的。作者认为, 这些思想和方法对其他类型的智能仪或许有参考意义。作者深感, 无论知识理论或技术经验都非常浅薄, 不妥之处, 盼望国内专家们指出。